NASA's
Centennial Challenge Program (CCP) directly engages the public at large
in the process of advanced technology development that is of value to
NASA's missions and to the aerospace community. CCP offers challenges
set up as competitions that award prize money to the individuals or
teams to achieve the specified technology challenge. The prize contests
are named "Centennial" in honor of the 100 years since the Wright brothers' first flight in 1903. The Wright Brothers' pioneering inventions embody the spirit of the challenges.
As a federal agency, NASA has one of the federal government's three largest procurement budgets. The Department of Energy (DOE) and the Defense Department
(DOD) round out the trio. With the subsequent proposal in Congress of
"H Prize" funding for breakthroughs in hydrogen fuel-related technology, the Department of Energy is poised to join NASA and DARPA's
Defense Department in fortifying this paradigm shift favoring a growing
quantity of technology experimenters who might otherwise be neglected
by traditional government contractors and federal procurement officials.
Current challenges
Sample return robot challenge
The
West Virginia University Mountaineers pose with their robot,
Cataglyphis, and officials at the 2014 NASA Centennial Challenges Sample
Return Robot Challenge at Worcester Polytechnic Institute in Worcester,
Mass., after completing Level 1 for a prize of $5,000. A year later,
the team won the $100,000 Level-2 Prize. In 2016, Team Mountaineers won
the final challenge with a $750,000 prize (NASA/Joel Kowsky)
The Sample Return Robot Challenge
is to build an autonomous rough-terrain robot which can find and
retrieve geologic samples. The intent is to advance autonomic robotics
and remote manipulator technology. The prize is US$1.5 million. The Allied Organization selected to partner with NASA to conduct this challenge is Worcester Polytechnic Institute in Worcester, Massachusetts. Team registration began Summer 2011, and the first competition was held June 16, 2012.
Eleven teams registered for the event, with six showing up to the
competition. All but one team were unable to compete after failing the
weigh-in and/or inspection. Team SpacePride competed in level one, but did not succeed.
The second running of the challenge took place June 6–8, 2013, at
WPI. Ten teams competed for a Level 1 prize. Team Survey of Los Angeles
was awarded $5,000 for successfully completing Level 1: their robot
left the platform, retrieved a sample and returned to the platform
within the 15-minute limit. No teams advanced to Level 2.
The third running of the challenge took place June 9–14, 2014, at WPI. 17 teams competed for Level 1 and Level 2 prizes.
Team Mountaineers from West Virginia University (WVU), led by Dr. Yu
Gu, successfully completed Level 1 challenge. No teams completed Level 2
challenge in 2014.
The fourth competition took place June 8–12, 2015, at WPI. 16 teams competed for Level 1 and Level 2 prizes. Team Mountaineers
from West Virginia University successfully completed Level 2 challenge
(with two collected samples or 3 points) and brought home a $100,000
prize. No other team completed Level 1 or Level 2 challenge in 2015.
The fifth year challenge was divided into two events. The Level 1
challenge happened between June 6–11, 2016. Five new teams completed
Level 1. The final Level 2 challenge was performed on Sep. 4 & 5.
Team Mountaineers from West Virginia University collected 5 samples with
a total score of 11 points, and won the challenge with a $750,000
prize.
Efforts were coordinated by NASA and the WPI Robotics Center.
Mars Ascent Vehicle Prize
The MAV Prize
is a challenge to demonstrate technologies that may be relevant to
future NASA Science Mission Directorate Mars missions. The competition
will mimic a MAV mission. When NASA eventually returns samples from
Mars, there will be a requirement for a special rocket system — the MAV —
to launch the samples from Mars’ surface into orbit for rendezvous with
a spacecraft that will return them to Earth.
The MAV Challenge requires highly reliable and autonomous sample
insertion into the rocket, launch from the surface, and deployment of
the sample container. Innovative technology from this competition may be
considered in future planning for a Mars exploration mission.
The first-place award is $25,000; second-place is $15,000; and
third-place is $10,000. Competing teams will be eligible for prize
money only after the successful completion of all the required tasks.
The inaugural competition was held in April 2015. North Carolina
State University of Raleigh won $25,000 for first place; Tarleton State
University of Stephenville, Texas, won second, winning $15,000. There
was no third-place winner.
Cube Quest Challenge
The
Cube Quest Challenge offers a prize purse of $5 million to teams that
meet the challenge objectives of designing, building and delivering
flight-qualified, small satellites capable of advanced operations near
and beyond the moon. Cube Quest teams will have the opportunity to
compete for a secondary payload spot on the first mission of NASA's
Orion spacecraft, which will launch atop the agency's Space Launch
System (SLS) rocket.
The competition includes three stages: Ground Tournaments, Deep Space
Derby, and Lunar Derby. The Ground Tournaments will be held every four
to six months, leading to an opportunity to earn a spot on the first
integrated flight of Orion and SLS. The Deep Space Derby will focus on
finding innovative solutions to deep space communications using small
spacecraft, and the Lunar Derby will focus primarily on propulsion for
small spacecraft and near-Earth communications.
Completed challenges
Green Flight Challenge
Pipistrel Taurus G4, the 2011 Green Flight Challenge winning aircraft of Pipistrel USA.com team, taxiing at the event.
The Green Flight Challenge sponsored by Google is to build an
aircraft which can fly 200 miles in under two hours using the energy
equivalent of a gallon of gasoline per passenger. The US$1,650,000 prize
was competed for Sept 25 - Oct 1, 2011 at the Charles M. Schulz Sonoma
County Airport, Santa Rosa, California. The CAFE Foundation was the Allied Organization which partnered with NASA's Centennial Challenges Program
to conduct the challenge. On October 1, 2011, CAFE had a competition
open house for the public to see the aircraft and meet the competing
teams. The Google Green Flight Challenge Exposition
was at NASA Ames Research Center in Sunnyvale, California on October 3,
2011. Free admission tickets were available at the Expo website. The Expo had the competition aircraft on display, presented winner checks and additional displays of green energy technology.
Strong tether challenge
This competition presented the challenge of constructing super-strong tethers, a crucial component of a space elevator.
The 2005 contest was to award US$50,000 to the team which constructed
the strongest tether, with contests in future years requiring that each
winner outperform that of the previous year by 50%. No competing tether
surpassed the commercial off-the-shelf baseline and the prize was increased to US$200,000 in 2006.
In 2007 the prize money was raised to US$500,000 USD for this competition.
The 2011 Strong Tether Centennial Challenge was held at the Space
Elevator Conference in Redmond, Washington on August 12, 2011. The
Space Elevator Conference, sponsored by Microsoft, The Leeward Space
Foundation and The International Space Elevator Consortium has hosted
the Tether competition for five years and there has yet to be a winner.
Power beam challenge
Power
Beam competitions were held in 2005, 2006, 2007 and 2009. They were
directed at space elevator applications. Teams built mechanical devices
(climbers) that could propel themselves up a vertical cable. The power
supply for the device was not self-contained but remained on the ground.
The technical challenge was to transmit the power to the climber and
transform it into mechanical motion, efficiently and reliably.
This was a competition to build a wirelessly-powered
ribbon-climbing robot. The contest involves having the robot lift a
large payload within a limited timeframe. The first competition in 2005
would have awarded US$50,000, US$20,000, and US$10,000 to the three
best-performing teams, meeting the minimum benchmark of 1 m/s. However,
no team met this standard, with only two teams climbing under beam
power. This prize also increased to US$200,000 in 2006, but no team was
able to accomplish the full set of requirements. See Elevator:2010 for more information on Power Beam Challenge as well as other challenges related to space elevator technologies.
In 2007 the prize money was raised to US$500,000 USD for this competition.
In the 2009 competition, the competitors drove their
laser-powered devices up a cable one kilometer high, suspended from a
helicopter. LaserMotive LLC was awarded US$900,000 in the 2009 Power Beaming Challenge.
Moon regolith Oxygen (MoonROx) challenge
This
head-to-head competition was for a system capable of extracting 2.5
kilograms of oxygen from 100 kilograms of artificial lunar regolith in 4 hours or less using at most 10 kW of power. This US$1 million prize expired in June 2009 without a winner.
The initial MoonROx challenge was announced in 2005 with the
intent to award a US$250,000 prize to the first team to develop the
capability to extract 5 kilograms of breathable oxygen from simulated
lunar soil in an eight-hour period. The prize expired in June 2008.
Since extracting oxygen from silicates is difficult, and the
oxygen electrochemically bound into the silicates at high temperature,
it is likely that a solar-furnace may be part of the solution.
In the 2007 competition, only the pressure-restraining layer part of
the glove was required. But for the 2009 challenge, teams had to
provide a complete glove, including the outer,
thermal-micrometeoroid-protection layer. This competition rewarded
US$200,000 in May 2007 to the team which constructed the best-performing
astronaut glove.
The first competition took place May 2 and May 3, 2007, at the New England Air Museum in Windsor Locks, Connecticut.
NASA offered a total of US$200,000 for the team that could design and
manufacture the best astronaut glove that exceeded minimum requirements.
An additional US$50,000 was offered to the team that best demonstrated
Mechanical Counter Pressure gloves. The US$200,000 prize was awarded to Peter K. Homer, an engineer from Southwest Harbor, Maine; the US$50,000 prize went unclaimed and rolled to the next competition.
The 2009 competition was held on November 18 and 19 at the Astronaut Hall of Fame in Titusville, Florida.
In the 2009 competition Peter K. Homer of Maine won US$250,000 and Ted
Southern of New York won US$100,000, both had competed previously.
Another challenge is planned and the date is yet to be announced.
Armadillo Aerospace technicians on the launch pad performing a vehicle inspection.
Also announced at the XPrize Cup Expo and run by the XPrize
Foundation, this prize is for a VTVL (vertical take-off, vertical
landing) suborbital rocket that can achieve the altitudes and launch
energies that are equivalent to what would be needed for a lunar lander.
The Vertical Lander Challenge requires 50 meter minimum altitude,
horizontal distance of 100 meters, flight time of 90 seconds, and
landing on a smooth surface and after refueling, return to its original
location. The more aggressive Lunar Lander Challenge increases that to
180s of flight time and landing on a rocky surface. The VLC has a first
prize of $350,000, while the LLC has a first prize in excess of this.
For 2006 at the Wirefly X PRIZE Cup, Armadillo Aerospace
was the only team able to compete. Their vehicle "Pixel" completed one
leg of the trip on its third try but crashed shortly after takeoff on
the return, leaving all prizes unclaimed.
In 2008, Armadillo Aerospace successfully completed the easier level one VLC prize.
In 2009, the level two first prize was won by Masten Space Systems, while Armadillo Aerospace took the level two second prize.
Regolith excavation challenge
In this Challenge, teams designed and built robotic machines to excavate simulated lunar soil (regolith). The Challenge was managed by the California Space Authority and was competed in 2007, 2008, and 2009, at which time the Challenge was won by a team from Worcester Polytechnic Institute, which won the US$500,000 prize purse.
The
Night Rover Challenge is to build a solar-powered robot which can
operate on stored energy for a significant portion of time. The intent
is to spur development of extreme environment battery technology for use
in space missions. The prize is US$1.5 million. NASA is partnered with nonprofit organization Clean Tech Open for this challenge. Requirements for proposal submission are here.
As of October 2013, the Night Rover Challenge was closed as no competitors registered.
Unmanned aircraft systems airspace operations challenge
In
October 2012 NASA announced a challenge with the goal of developing
some of the key technologies that will make it possible to integrate unmanned aerial vehicles into the National Airspace System. The challenge's focus was on demonstrating a high level of operational robustness and the ability to "sense and avoid" other air traffic.
The challenge was to have been divided into two parts: Phase 1
was scheduled to be held in Spring 2014, and Phase 2 would have taken
place one year after Phase 1 was successfully completed. The total
prize money available in Phase 1 was US$500,000. Phase 2 was planned to
have US$1 million in prize money.
In May 2013, NASA announced that it had selected Development Projects Inc. of Dayton, Ohio to manage the challenge.
As of November 2014, NASA has cancelled the Unmanned Aircraft
Systems (UAS) Airspace Operations Challenge (AOC) due to unanticipated
technical and operational issues as well as additional costs. NASA
Centennial Challenges have historically been high-risk and leveraged
activities conducted with minimal government funding. NASA reviewed the
intended outcomes of the AOC and determined that the competition was no
longer timely or cost-effective to execute as planned. NASA's
cancellation of the AOC was not based in any way on technical progress
or performance of the registered teams.
CO2 conversion challenge
The CO2
conversion challenge is a competition to convert carbon dioxide into
sugars to be used as feedstock for biomanufacturing in space and on
Mars.
The competition began in 2018 to incentivize the public to recreate the
process plants do regularly, except with a non-biological system. Five
teams were each awarded a $50,000 milestone prize in 2019 for Phase 1 of
the competition to design a system that could accomplish the chemical
transformation, including teams from University of California, Princeton University, Rutgers University, Air Company, and Dioxide Materials. Phase 2 of the competition ended in 2021, and three teams split a $750,000 prize purse.
Spent nuclear fuel stored underwater and uncapped at the Hanford site in Washington, USA.
High-level radioactive waste management concerns how radioactive materials created during production of nuclear power and nuclear weapons are dealt with. Radioactive waste contains a mixture of short-lived and long-lived nuclides, as well as non-radioactive nuclides. There was reportedly some 47,000 tonnes (100 million pounds) of high-level nuclear waste stored in the United States in 2002.
The most troublesome transuranic elements in spent fuel are neptunium-237 (half-life two million years) and plutonium-239 (half-life 24,000 years). Consequently, high-level radioactive waste requires sophisticated treatment and management to successfully isolate it from the biosphere.
This usually necessitates treatment, followed by a long-term management
strategy involving permanent storage, disposal or transformation of the
waste into a non-toxic form. Radioactive decay follows the half-life
rule, which means that the rate of decay is inversely proportional to
the duration of decay. In other words, the radiation from a long-lived isotope like iodine-129 will be much less intense than that of short-lived isotope like iodine-131.
Governments around the world are considering a range of waste management and disposal options, usually involving deep-geologic placement, although there has been limited progress toward implementing long-term waste management solutions. This is partly because the timeframes in question when dealing with radioactive waste range from 10,000 to millions of years, according to studies based on the effect of estimated radiation doses.
Thus, engineer and physicist Hannes Alfvén
identified two fundamental prerequisites for effective management of
high-level radioactive waste: (1) stable geological formations, and (2)
stable human institutions over hundreds of thousands of years. As Alfvén
suggests, no known human civilization has ever endured for so long, and
no geologic formation of adequate size for a permanent radioactive
waste repository has yet been discovered that has been stable for so
long a period.
Nevertheless, avoiding confronting the risks associated with managing
radioactive wastes may create countervailing risks of greater magnitude.
Radioactive waste management is an example of policy analysis that
requires special attention to ethical concerns, examined in the light of
uncertainty and futurity: consideration of 'the impacts of practices and technologies on future generations'.
There is a debate over what should constitute an acceptable
scientific and engineering foundation for proceeding with radioactive
waste disposal strategies. There are those who have argued, on the basis
of complex geochemical simulation models, that relinquishing control
over radioactive materials to geohydrologic processes at repository
closure is an acceptable risk. They maintain that so-called "natural
analogues" inhibit subterranean movement of radionuclides, making
disposal of radioactive wastes in stable geologic formations
unnecessary. However, existing models of these processes are empirically underdetermined:
due to the subterranean nature of such processes in solid geologic
formations, the accuracy of computer simulation models has not been
verified by empirical observation, certainly not over periods of time
equivalent to the lethal half-lives of high-level radioactive waste.
On the other hand, some insist deep geologic repositories in stable
geologic formations are necessary. National management plans of various
countries display a variety of approaches to resolving this debate.
Researchers suggest that forecasts of health detriment for such long periods should be examined critically. Practical studies only consider up to 100 years as far as effective planning and cost evaluations are concerned. Long term behaviour of radioactive wastes remains a subject for ongoing research. Management strategies and implementation plans of several representative national governments are described below.
It is widely accepted that spent nuclear fuel and high-level
reprocessing and plutonium wastes require well-designed storage for
periods ranging from tens of thousands to a million years, to minimize
releases of the contained radioactivity into the environment. Safeguards
are also required to ensure that neither plutonium nor highly enriched
uranium is diverted to weapon use. There is general agreement that
placing spent nuclear fuel in repositories hundreds of meters below the
surface would be safer than indefinite storage of spent fuel on the
surface.
The process of selecting appropriate permanent repositories for high
level waste and spent fuel is now under way in several countries with
the first expected to be commissioned some time after 2017.
The basic concept is to locate a large, stable geologic formation and
use mining technology to excavate a tunnel, or large-bore tunnel boring machines (similar to those used to drill the Channel Tunnel
from England to France) to drill a shaft 500–1,000 metres
(1,600–3,300 ft) below the surface where rooms or vaults can be
excavated for disposal of high-level radioactive waste. The goal is to
permanently isolate nuclear waste from the human environment. However,
many people remain uncomfortable with the immediate stewardship cessation of this disposal system, suggesting perpetual management and monitoring would be more prudent.
Because some radioactive species have half-lives longer than one
million years, even very low container leakage and radionuclide
migration rates must be taken into account.
Moreover, it may require more than one half-life until some nuclear
materials lose enough radioactivity to no longer be lethal to living
organisms. A 1983 review of the Swedish radioactive waste disposal
program by the National Academy of Sciences found that country’s
estimate of several hundred thousand years—perhaps up to one million
years—being necessary for waste isolation "fully justified."
The proposed land-based subductive waste disposal method would dispose of nuclear waste in a subduction zone accessed from land,
and therefore is not prohibited by international agreement. This method
has been described as a viable means of disposing of radioactive waste, and as a state-of-the-art nuclear waste disposal technology.
In nature, sixteen repositories were discovered at the Oklo mine in Gabon where natural nuclear fission reactions took place 1.7 billion years ago. The fission products in these natural formations were found to have moved less than 10 ft (3 m) over this period, though the lack of movement may be due more to retention in the uraninite
structure than to insolubility and sorption from moving ground water;
uraninite crystals are better preserved here than those in spent fuel rods because of a less complete nuclear reaction, so that reaction products would be less accessible to groundwater attack.
Horizontal drillhole disposal
describes proposals to drill over one kilometer vertically, and two
kilometers horizontally in the earth’s crust, for the purpose of
disposing of high-level waste forms such as spent nuclear fuel, Caesium-137, or Strontium-90. After the emplacement and the retrievability period,
drillholes would be backfilled and sealed. A series of tests of the
technology were carried out in November 2018 and then again publicly in
January 2019 by a U.S. based private company.
The test demonstrated the emplacement of a test-canister in a
horizontal drillhole and retrieval of the same canister. There was no
actual high-level waste used in this test.
Materials for geological disposal
In
order to store the high level radioactive waste in long-term geological
depositories, specific waste forms need to be used which will allow the
radioactivity to decay away while the materials retain their integrity
for thousands of years.
The materials being used can be broken down into a few classes: glass
waste forms, ceramic waste forms, and nanostructured materials.
The glass forms
include borosilicate glasses and phosphate glasses. Borosilicate
nuclear waste glasses are used on an industrial scale to immobilize high
level radioactive waste in many countries which are producers of
nuclear energy or have nuclear weaponry. The glass waste forms have the
advantage of being able to accommodate a wide variety of waste-stream
compositions, they are easy to scale up to industrial processing, and
they are stable against thermal, radiative, and chemical perturbations.
These glasses function by binding radioactive elements to nonradioactive
glass-forming elements.
Phosphate glasses while not being used industrially have much lower
dissolution rates than borosilicate glasses, which make them a more
favorable option. However, no single phosphate material has the ability
to accommodate all of the radioactive products so phosphate storage
requires more reprocessing to separate the waste into distinct
fractions.
Both glasses have to be processed at elevated temperatures making them
unusable for some of the more volatile radiotoxic elements.
The ceramic waste
forms offer higher waste loadings than the glass options because
ceramics have crystalline structure. Also, mineral analogues of the
ceramic waste forms provide evidence for long term durability.
Due to this fact and the fact that they can be processed at lower
temperatures, ceramics are often considered the next generation in high
level radioactive waste forms. Ceramic waste forms offer great potential, but a lot of research remains to be done.
National management plans
Finland,
the United States and Sweden are the most advanced in developing a deep
repository for high-level radioactive waste disposal. Countries vary in
their plans on disposing used fuel directly or after reprocessing, with
France and Japan having an extensive commitment to reprocessing. The
country-specific status of high-level waste management plans are
described below.
In many European countries (e.g., Britain, Finland, the
Netherlands, Sweden and Switzerland) the risk or dose limit for a member
of the public exposed to radiation from a future high-level nuclear
waste facility is considerably more stringent than that suggested by the
International Commission on Radiation Protection or proposed in the
United States. European limits are often more stringent than the
standard suggested in 1990 by the International Commission on Radiation
Protection by a factor of 20, and more stringent by a factor of ten than
the standard proposed by the U.S. Environmental Protection Agency (EPA)
for Yucca Mountain nuclear waste repository
for the first 10,000 years after closure. Moreover, the U.S. EPA’s
proposed standard for greater than 10,000 years is 250 times more
permissive than the European limit.
The countries that have made the most progress towards a
repository for high-level radioactive waste have typically started with public consultations
and made voluntary siting a necessary condition. This consensus seeking
approach is believed to have a greater chance of success than top-down
modes of decision making, but the process is necessarily slow, and there
is "inadequate experience around the world to know if it will succeed
in all existing and aspiring nuclear nations".
Moreover, most communities do not want to host
a nuclear waste repository as they are "concerned about their community
becoming a de facto site for waste for thousands of years, the health
and environmental consequences of an accident, and lower property
values".
Asia
China
In China (People's Republic of China), ten reactors provide about 2% of electricity and five more are under construction. China made a commitment to reprocessing in the 1980s; a pilot plant is under construction at Lanzhou,
where a temporary spent fuel storage facility has been constructed.
Geological disposal has been studied since 1985, and a permanent deep
geological repository was required by law in 2003. Sites in Gansu Province near the Gobi
desert in northwestern China are under investigation, with a final site
expected to be selected by 2020, and actual disposal by about 2050.
India
adopted a closed fuel cycle, which involves reprocessing and recycling
of the spent fuel. The reprocessing results in 2-3% of the spent fuel
going to waste while the rest is recycled. The waste fuel, called high
level liquid waste, is converted to glass through vitrification.
Vitrified waste is then stored for a period of 30–40 years for cooling.
Sixteen nuclear reactors produce about 3% of India’s electricity, and seven more are under construction. Spent fuel is processed at facilities in Trombay near Mumbai, at Tarapur on the west coast north of Mumbai, and at Kalpakkam
on the southeast coast of India. Plutonium will be used in a fast
breeder reactor (under construction) to produce more fuel, and other
waste vitrified at Tarapur and Trombay. Interim storage for 30 years is expected, with eventual disposal in a deep geological repository in crystalline rock near Kalpakkam.
Japan
In 2000, a
Specified Radioactive Waste Final Disposal Act called for creation of a
new organization to manage high level radioactive waste, and later that
year the Nuclear Waste Management Organization of Japan (NUMO) was
established under the jurisdiction of the Ministry of Economy, Trade and
Industry. NUMO is responsible for selecting a permanent deep geological repository site, construction, operation and closure of the facility for waste emplacement by 2040.
Site selection began in 2002 and application information was sent to
3,239 municipalities, but by 2006, no local government had volunteered
to host the facility. Kōchi Prefecture
showed interest in 2007, but its mayor resigned due to local
opposition. In December 2013 the government decided to identify suitable
candidate areas before approaching municipalities.
The head of the Science Council of Japan’s
expert panel has said Japan's seismic conditions makes it difficult to
predict ground conditions over the necessary 100,000 years, so it will
be impossible to convince the public of the safety of deep geological
disposal.
Europe
Belgium
Belgium has seven nuclear reactors that provide about 52% of its electricity.
Belgian spent nuclear fuel was initially sent for reprocessing in
France. In 1993, reprocessing was suspended following a resolution of
the Belgian parliament;
spent fuel is since being stored on the sites of the nuclear power
plants. The deep disposal of high-level radioactive waste (HLW) has been
studied in Belgium for more than 30 years. Boom Clay is studied as a
reference host formation for HLW disposal. The Hades underground
research laboratory (URL) is located at −223 m (−732 ft) in the Boom
Formation at the Mol site. The Belgian URL is operated by the Euridice Economic Interest Group, a joint organisation between SCK•CEN, the Belgian Nuclear Research Centre which initiated the research on waste disposal in Belgium in the 1970s and 1980s and ONDRAF/NIRAS,
the Belgian agency for radioactive waste management. In Belgium, the
regulatory body in charge of guidance and licensing approval is the
Federal Agency of Nuclear Control, created in 2001.
Finland
In
1983, the government decided to select a site for permanent repository
by 2010. With four nuclear reactors providing 29% of its electricity,
Finland in 1987 enacted a Nuclear Energy Act making the producers of
radioactive waste responsible for its disposal, subject to requirements
of its Radiation and Nuclear Safety Authority
and an absolute veto given to local governments in which a proposed
repository would be located. Producers of nuclear waste organized the
company Posiva,
with responsibility for site selection, construction and operation of a
permanent repository. A 1994 amendment to the Act required final
disposal of spent fuel in Finland, prohibiting the import or export of
radioactive waste.
Environmental assessment of four sites occurred in 1997–98, Posiva chose the Olkiluoto
site near two existing reactors, and the local government approved it
in 2000. The Finnish Parliament approved a deep geologic repository
there in igneous bedrock at a depth of about 500 metres (1,600 ft) in
2001. The repository concept is similar to the Swedish model, with
containers to be clad in copper and buried below the water table
beginning in 2020. An underground characterization facility, Onkalo spent nuclear fuel repository, was constructed at the site from 2004 to 2017.
France
With 58 nuclear reactors contributing about 75% of its electricity,
the highest percentage of any country, France has been reprocessing its
spent reactor fuel since the introduction of nuclear power there. Some
reprocessed plutonium is used to make fuel, but more is being produced
than is being recycled as reactor fuel.
France also reprocesses spent fuel for other countries, but the nuclear
waste is returned to the country of origin. Radioactive waste from
reprocessing French spent fuel is expected to be disposed of in a
geological repository, pursuant to legislation enacted in 1991 that
established a 15-year period for conducting radioactive waste management
research. Under this legislation, partition and transmutation of
long-lived elements, immobilization and conditioning processes, and
long-term near surface storage are being investigated by the
Commissariat à l’Energie Atomique (CEA). Disposal in deep geological
formations is being studied by the French agency for radioactive waste
management (Agence nationale pour la Gestion des Déchets radioactifs),
in underground research labs.
Three sites were identified for possible deep geologic disposal in clay near the border of Meuse and Haute-Marne, near Gard, and at Vienne. In 1998 the government approved the Meuse/Haute Marne Underground Research Laboratory, a site near Meuse/Haute-Marne and dropped the others from further consideration. Legislation was proposed in 2006 to license a repository by 2020, with operations expected in 2035.
Nuclear waste policy in Germany is in flux. German planning for a permanent geologic repository began in 1974, focused on salt dome Gorleben,
a salt mine near Gorleben about 100 kilometres (62 mi) northeast of
Braunschweig. The site was announced in 1977 with plans for a
reprocessing plant, spent fuel management, and permanent disposal
facilities at a single site. Plans for the reprocessing plant were
dropped in 1979. In 2000, the federal government and utilities agreed to
suspend underground investigations for three to ten years, and the
government committed to ending its use of nuclear power, closing one
reactor in 2003.
Within days of the March 2011 Fukushima Daiichi nuclear disaster, Chancellor Angela Merkel
"imposed a three-month moratorium on previously announced extensions
for Germany's existing nuclear power plants, while shutting seven of the
17 reactors that had been operating since 1981". Protests continued
and, on 29 May 2011, Merkel's government announced that it would close
all of its nuclear power plants by 2022.
Meanwhile, electric utilities have been transporting spent fuel
to interim storage facilities at Gorleben, Lubmin and Ahaus until
temporary storage facilities can be built near reactor sites.
Previously, spent fuel was sent to France or the United Kingdom for
reprocessing, but this practice was ended in July 2005.
Netherlands
COVRA (Centrale Organisatie Voor Radioactief Afval) is the Dutch interim nuclear waste processing and storage company in Vlissingen, which stores the waste produced in their only remaining nuclear power plant after it is reprocessed by Areva NC in La Hague, Manche, Normandy, France. Until the Dutch government
decides what to do with the waste, it will stay at COVRA, which
currently has a license to operate for one hundred years. As of early
2017, there are no plans for a permanent disposal facility.
Russia
In Russia, the Ministry of Atomic Energy (Minatom) is responsible for 31 nuclear reactors which generate about 16% of its electricity.
Minatom is also responsible for reprocessing and radioactive waste
disposal, including over 25,000 tonnes (55 million pounds) of spent
nuclear fuel in temporary storage in 2001.
Russia has a long history of reprocessing spent fuel for military
purposes, and previously planned to reprocess imported spent fuel,
possibly including some of the 33,000 tonnes (73 million pounds) of
spent fuel accumulated at sites in other countries who received fuel
from the U.S., which the U.S. originally pledged to take back, such as
Brazil, the Czech Republic, India, Japan, Mexico, Slovenia, South Korea,
Switzerland, Taiwan, and the European Union.
An Environmental Protection Act in 1991 prohibited importing
radioactive material for long-term storage or burial in Russia, but
controversial legislation to allow imports for permanent storage was
passed by the Russian Parliament and signed by President Putin in 2001. In the long term, the Russian plan is for deep geologic disposal.
Most attention has been paid to locations where waste has accumulated
in temporary storage at Mayak, near Chelyabinsk in the Ural Mountains,
and in granite at Krasnoyarsk in Siberia.
Spain
Spain has five active nuclear plants with seven reactors
which produced 21% of the country's electricity in 2013. Furthermore,
there is legacy high-level waste from another two older, closed plants.
Between 2004 and 2011, a bipartisan initiative of the Spanish Government promoted the construction of an interim centralized storage facility (ATC, Almacén Temporal Centralizado), similar to the Dutch COVRA
concept. In late 2011 and early 2012 the final green light was given,
preliminary studies were being completed and land was purchased near Villar de Cañas (Cuenca) after a competitive tender process. The facility would be initially licensed for 60 years.
However, soon before groundbreaking was slated to begin in 2015,
the project was stopped because of a mix of geological, technical,
political and ecological problems. By late 2015, the Regional Government
considered it "obsolete" and effectively "paralyzed." As of early 2017,
the project has not been shelved but it stays frozen and no further
action is expected anytime soon. Meanwhile, the spent nuclear fuel and
other high-level waste is being kept in the plants' pools, as well as
on-site dry cask storage (almacenes temporales individualizados) in Garoña and Trillo.
As of early 2017, there are no plans for a permanent high-level
disposal facility either. Low- and medium-level waste is stored in the El Cabril facility (Province of Cordoba.)
Sweden
In Sweden, as of 2007 there are ten operating nuclear reactors that produce about 45% of its electricity. Two other reactors in Barsebäck were shut down in 1999 and 2005.
When these reactors were built, it was expected their nuclear fuel
would be reprocessed in a foreign country, and the reprocessing waste
would not be returned to Sweden. Later, construction of a domestic reprocessing plant was contemplated, but has not been built.
Passage of the Stipulation Act of 1977 transferred responsibility
for nuclear waste management from the government to the nuclear
industry, requiring reactor operators to present an acceptable plan for
waste management with "absolute safety" in order to obtain an operating
license.In early 1980, after the Three Mile Island
meltdown in the United States, a referendum was held on the future use
of nuclear power in Sweden. In late 1980, after a three-question
referendum produced mixed results, the Swedish Parliament decided to
phase out existing reactors by 2010.
On 5 February 2009, the Government of Sweden announced an agreement
allowing for the replacement of existing reactors, effectively ending
the phase-out policy. In 2010, the Swedish government opened up for
construction of new nuclear reactors. The new units can only be built at
the existing nuclear power sites, Oskarshamn, Ringhals or Forsmark, and
only to replace one of the existing reactors, that will have to be shut
down for the new one to be able to start up.
The Swedish Nuclear Fuel and Waste Management Company.
(Svensk Kärnbränslehantering AB, known as SKB) was created in 1980 and
is responsible for final disposal of nuclear waste there. This includes
operation of a monitored retrievable storage facility, the Central
Interim Storage Facility for Spent Nuclear Fuel at Oskarshamn,
about 240 kilometres (150 mi) south of Stockholm on the Baltic coast;
transportation of spent fuel; and construction of a permanent
repository.
Swedish utilities store spent fuel at the reactor site for one year
before transporting it to the facility at Oskarshamn, where it will be
stored in excavated caverns filled with water for about 30 years before
removal to a permanent repository.
Conceptual design of a permanent repository was determined by
1983, calling for placement of copper-clad iron canisters in granite
bedrock about 500 metres (1,600 ft) underground, below the water table
in what is known as the KBS-3 method. Space around the canisters will be filled with bentonite clay. After examining six possible locations for a permanent repository, three were nominated for further investigation, at Osthammar, Oskarshamn, and Tierp.
On 3 June 2009, Swedish Nuclear Fuel and Waste Co. chose a location for
a deep-level waste site at Östhammar, near Forsmark Nuclear Power
plant. The application to build the repository was handed in by SKB
2011, and was approved by the Swedish Government on 27 January 2022.
Switzerland has five nuclear reactors that provide about 43% of its electricity around 2007 (34% in 2015).
Some Swiss spent nuclear fuel has been sent for reprocessing in France
and the United Kingdom; most fuel is being stored without reprocessing.
An industry-owned organization, ZWILAG, built and operates a central
interim storage facility for spent nuclear fuel and high-level
radioactive waste, and for conditioning low-level radioactive waste and
for incinerating wastes. Other interim storage facilities predating
ZWILAG continue to operate in Switzerland.
The Swiss program is considering options for the siting of a deep
repository for high-level radioactive waste disposal, and for low and
intermediate level wastes. Construction of a repository is not foreseen
until well into this century. Research on sedimentary rock (especially
Opalinus Clay) is carried out at the Swiss Mont Terri rock laboratory; the Grimsel Test Site, an older facility in crystalline rock is also still active.
United Kingdom
Great Britain has 19 operating reactors, producing about 20% of its electricity. It processes much of its spent fuel at Sellafield
on the northwest coast across from Ireland, where nuclear waste is
vitrified and sealed in stainless steel canisters for dry storage above
ground for at least 50 years before eventual deep geologic disposal.
Sellafield has a history of environmental and safety problems, including
a fire in a nuclear plant in Windscale, and a significant incident in 2005 at the main reprocessing plant (THORP).
In 1982 the Nuclear Industry Radioactive Waste Management
Executive (NIREX) was established with responsibility for disposing of
long-lived nuclear waste
and in 2006 a Committee on Radioactive Waste Management (CoRWM) of the
Department of Environment, Food and Rural Affairs recommended geologic
disposal 200–1,000 metres (660–3,280 ft) underground. NIREX developed a generic repository concept based on the Swedish model
but has not yet selected a site. A Nuclear Decommissioning Authority is
responsible for packaging waste from reprocessing and will eventually
relieve British Nuclear Fuels Ltd. of responsibility for power reactors
and the Sellafield reprocessing plant.
The 18 operating nuclear power plants in Canada generated about 16% of its electricity in 2006. A national Nuclear Fuel Waste Act was enacted by the Canadian Parliament
in 2002, requiring nuclear energy corporations to create a waste
management organization to propose to the Government of Canada
approaches for management of nuclear waste, and implementation of an
approach subsequently selected by the government. The Act defined
management as "long term management by means of storage or disposal,
including handling, treatment, conditioning or transport for the purpose
of storage or disposal."
The resulting Nuclear Waste Management Organization
(NWMO) conducted an extensive three-year study and consultation with
Canadians. In 2005, they recommended Adaptive Phased Management, an
approach that emphasized both technical and management methods. The
technical method included centralized isolation and containment of spent
nuclear fuel in a deep geologic repository in a suitable rock
formation, such as the granite of the Canadian Shield or Ordovician sedimentary rocks. Also recommended was a phased decision-making process supported by a program of continuous learning, research and development.
In 2007, the Canadian government accepted this recommendation,
and NWMO was tasked with implementing the recommendation. No specific
timeframe was defined for the process. In 2009, the NWMO was designing
the process for site selection; siting was expected to take 10 years or
more.
The locations across the U.S. where nuclear waste is stored
The Nuclear Waste Policy Act
of 1982 established a timetable and procedure for constructing a
permanent, underground repository for high-level radioactive waste by
the mid-1990s, and provided for some temporary storage of waste,
including spent fuel from 104 civilian nuclear reactors that produce
about 19.4% of electricity there.
The United States in April 2008 had about 56,000 tonnes (120 million
pounds) of spent fuel and 20,000 canisters of solid defense-related
waste, and this is expected to increase to 119,000 tonnes (260 million
pounds) by 2035. The U.S. opted for Yucca Mountain nuclear waste repository, a final repository at Yucca Mountain in Nevada,
but this project was widely opposed, with some of the main concerns
being long-distance transportation of waste from across the United
States to this site, the possibility of accidents, and the uncertainty
of success in isolating nuclear waste from the human environment in
perpetuity. Yucca Mountain, with capacity for 70,000 tonnes (150 million
pounds) of radioactive waste, was expected to open in 2017. However,
the Obama Administration rejected use of the site in the 2009 United States Federal Budget proposal, which eliminated all funding except that needed to answer inquiries from the Nuclear Regulatory Commission, "while the Administration devises a new strategy toward nuclear waste disposal." On March 5, 2009, Energy SecretarySteven Chu told a Senate hearing "the Yucca Mountain site no longer was viewed as an option for storing reactor waste." Starting in 1999, military-generated nuclear waste is being entombed at the Waste Isolation Pilot Plant in New Mexico.
Since the fraction of a radioisotope's atoms decaying per unit of
time is inversely proportional to its half-life, the relative
radioactivity of a quantity of buried human radioactive waste would
diminish over time compared to natural radioisotopes; such as the decay
chains of 120 million megatonnes (260 quadrillion pounds) of thorium and
40 million megatonnes (88 quadrillion pounds) of uranium which are at relatively trace concentrations of parts per million each over the crust's 30,000 quadrillion tonnes (66,000,000 quadrillion pounds) mass.
For instance, over a timeframe of thousands of years, after the most
active short half-life radioisotopes decayed, burying U.S. nuclear waste
would increase the radioactivity in the top 610 metres (2,000 ft) of
rock and soil in the United States (10 million square kilometres,
3.9 million square miles) by ≈ 1 part in 10 million over the cumulative amount of natural radioisotopes
in such a volume, although the vicinity of the site would have a far
higher concentration of artificial radioisotopes underground than such
an average.
In a Presidential Memorandum dated January 29, 2010, President Obama established the Blue Ribbon Commission on America’s Nuclear Future (the commission).
The commission, composed of fifteen members, conducted an extensive
two-year study of nuclear waste disposal, what is referred to as the
"back end" of the nuclear energy process. The commission established three subcommittees: Reactor and Fuel Cycle Technology, Transportation and Storage, and Disposal. On January 26, 2012, the Commission submitted its final report to Energy Secretary Steven Chu.
In the Disposal Subcommittee’s final report, the Commission does not
issue recommendations for a specific site but rather presents a
comprehensive recommendation for disposal strategies. During their
research, the Commission visited Finland, France, Japan, Russia, Sweden,
and the UK. In their final report, the Commission put forth seven recommendations for developing a comprehensive strategy to pursue:
Recommendation #1
The United States should undertake an integrated nuclear waste
management program that leads to the timely development of one or more
permanent deep geological facilities for the safe disposal of spent fuel
and high-level nuclear waste.
Recommendation #2
A new, single-purpose organization is needed to develop and
implement a focused, integrated program for the transportation, storage,
and disposal of nuclear waste in the United States.
Recommendation #3
Assured access to the balance in the Nuclear Waste Fund (NWF) and to
the revenues generated by annual nuclear waste fee payments from
utility ratepayers is absolutely essential and must be provided to the
new nuclear waste management organization.
Recommendation #4
A new approach is needed to site and develop nuclear waste
facilities in the United States in the future. We believe that these
processes are most likely to succeed if they are:
Adaptive—in the sense that process itself is flexible and
produces decisions that are responsive to new information and new
technical, social, or political developments.
Staged—in the sense that key decisions are revisited and modified as
necessary along the way rather than being pre-determined in advance.
Consent-based—in the sense that affected communities have an
opportunity to decide whether to accept facility siting decisions and
retain significant local control.
Transparent—in the sense that all stakeholders have an opportunity
to understand key decisions and engage in the process in a meaningful
way.
Standards- and science-based—in the sense that the public can have
confidence that all facilities meet rigorous, objective, and
consistently-applied standards of safety and environmental protection.
Governed by partnership arrangements or legally-enforceable agreements with host states, tribes and local communities.
Recommendation #5
The current division of regulatory responsibilities for long-term
repository performance between the NRC and the EPA is appropriate and
should continue. The two agencies should develop new, site-independent
safety standards in a formally coordinated joint process that actively
engages and solicits input from all the relevant constituencies.
Recommendation #6
The roles, responsibilities, and authorities of local, state, and
tribal governments (with respect to facility siting and other aspects of
nuclear waste disposal) must be an element of the negotiation between
the federal government and the other affected units of government in
establishing a disposal facility. In addition to legally-binding
agreements, as discussed in Recommendation #4, all affected levels of
government (local, state, tribal, etc.) must have, at a minimum, a
meaningful consultative role in all other important decisions.
Additionally, states and tribes should retain—or where appropriate, be
delegated—direct authority over aspects of regulation, permitting, and
operations where oversight below the federal level can be exercised
effectively and in a way that is helpful in protecting the interests and
gaining the confidence of affected communities and citizens.[96]
Biden administration
has recommended the categorization of waste by level of radioactivity
rather than the source of the waste which would enable new management
plans.
International repository
Although Australia does not have any nuclear power reactors, Pangea Resources
considered siting an international repository in the outback of South
Australia or Western Australia in 1998, but this stimulated legislative
opposition in both states and the Australian national Senate during the following year.
Thereafter, Pangea ceased operations in Australia but reemerged as
Pangea International Association, and in 2002 evolved into the
Association for Regional and International Underground Storage with
support from Belgium, Bulgaria, Hungary, Japan and Switzerland. A general concept for an international repository has been advanced by one of the principals in all three ventures.
Russia has expressed interest in serving as a repository for other
countries, but does not envision sponsorship or control by an
international body or group of other countries. South Africa, Argentina
and western China have also been mentioned as possible locations.
In the EU, COVRA
is negotiating a European-wide waste disposal system with single
disposal sites that can be used by several EU-countries. This EU-wide
storage possibility is being researched under the SAPIERR-2 program.
The planet Mars
has been explored remotely by spacecraft. Probes sent from Earth,
beginning in the late 20th century, have yielded a large increase in
knowledge about the Martian system, focused primarily on understanding its geology and habitability potential. Engineering interplanetary journeys is complicated and the exploration of Mars
has experienced a high failure rate, especially the early attempts.
Roughly sixty percent of all spacecraft destined for Mars failed before
completing their missions and some failed before their observations
could begin. Some missions have been met with unexpected success, such
as the twin Mars Exploration Rovers, Spirit and Opportunity, which operated for years beyond their specification.
Current status
A 19th-century hand-drawn map by Giovanni Schiaparelli, and a more modern photographic image, with a blended one in the middle
Mars has long been the subject of human interest. Early telescopic
observations revealed color changes on the surface that were attributed
to seasonal vegetation and apparent linear features were ascribed to intelligent design. Further telescopic observations found two moons, Phobos and Deimos, polar ice caps and the feature now known as Olympus Mons, the Solar System's
tallest mountain. The discoveries piqued further interest in the study
and exploration of the red planet. Mars is a rocky planet, like Earth, that formed around the same time, yet with only half the diameter of Earth, and a far thinner atmosphere; it has a cold and desert-like surface.
One way the surface of Mars has been categorized, is by thirty "quadrangles", with each quadrangle named for a prominent physiographic feature within that quadrangle.
Clickable image of the 30 cartographic quadrangles of Mars, defined by the USGS.Quadrangle numbers (beginning with MC for "Mars Chart") and names link to the corresponding articles. North is at the top; 0°N180°W is at the far left on the equator. The map images were taken by the Mars Global Surveyor.
Launch windows
Spacecraft launches and Mars distance from Earth in millions of kilometers
The minimum-energy launch windows for a Martian expedition occur at intervals of approximately two years and two months (specifically 780 days, the planet's synodic period with respect to Earth). In addition, the lowest available transfer energy varies on a roughly 16-year cycle.
For example, a minimum occurred in the 1969 and 1971 launch windows,
rising to a peak in the late 1970s, and hitting another low in 1986 and
1988.
Starting in 1960, the Soviets launched a series of probes to Mars including the first intended flybys and hard (impact) landing (Mars 1962B). The first successful flyby of Mars was on 14–15 July 1965, by NASA's Mariner 4. On November 14, 1971, Mariner 9 became the first space probe to orbit another planet when it entered into orbit around Mars. The amount of data returned by probes increased dramatically as technology improved.
The first to contact the surface were two Soviet probes: Mars 2lander on November 27 and Mars 3 lander on December 2, 1971—Mars 2 failed during descent and Mars 3 about twenty seconds after the first Martian soft landing. Mars 6 failed during descent but did return some corrupted atmospheric data in 1974. The 1975 NASA launches of the Viking program consisted of two orbiters, each with a lander that successfully soft landed in 1976. Viking 1 remained operational for six years, Viking 2 for three. The Viking landers relayed the first color panoramas of Mars.
The Soviet probes Phobos 1 and 2
were sent to Mars in 1988 to study Mars and its two moons, with a focus
on Phobos. Phobos 1 lost contact on the way to Mars. Phobos 2, while
successfully photographing Mars and Phobos, failed before it was set to
release two landers to the surface of Phobos.
Mars has a reputation as a difficult space exploration target;
just 25 of 55 missions through 2019, or 45.5%, have been fully
successful, with a further three partially successful and partially
failures. However, of the sixteen missions since 2001, twelve have been successful and eight of these are still operational.
Missions that ended prematurely after Phobos 1 and 2 (1988) include (see Probing difficulties section for more details):
Following the 1993 failure of the Mars Observer orbiter, the NASA Mars Global Surveyor
achieved Mars orbit in 1997. This mission was a complete success,
having finished its primary mapping mission in early 2001. Contact was
lost with the probe in November 2006 during its third extended program,
spending exactly 10 operational years in space. The NASA Mars Pathfinder, carrying a robotic exploration vehicle Sojourner, landed in the Ares Vallis on Mars in the summer of 1997, returning many images.
NASA's Mars Odyssey orbiter entered Mars orbit in 2001. Odyssey'sGamma Ray Spectrometer detected significant amounts of hydrogen in the upper metre or so of regolith on Mars. This hydrogen is thought to be contained in large deposits of water ice.
The Mars Express mission of the European Space Agency (ESA) reached Mars in 2003. It carried the Beagle 2 lander, which was not heard from after being released and was declared lost in February 2004. Beagle 2 was located in January 2015 by HiRise camera on NASA's Mars Reconnaissance Orbiter (MRO) having landed safely but failed to fully deploy its solar panels and antenna. In early 2004, the Mars ExpressPlanetary Fourier Spectrometer team announced the orbiter had detected methane in the Martian atmosphere, a potential biosignature. ESA announced in June 2006 the discovery of aurorae on Mars by the Mars Express.
In January 2004, the NASA twin Mars Exploration Rovers named Spirit (MER-A) and Opportunity
(MER-B) landed on the surface of Mars. Both have met and exceeded all
their science objectives. Among the most significant scientific returns
has been conclusive evidence that liquid water existed at some time in
the past at both landing sites. Martian dust devils and windstorms have occasionally cleaned both rovers' solar panels, and thus increased their lifespan. Spirit
rover (MER-A) was active until 2010, when it stopped sending data
because it got stuck in a sand dune and was unable to reorient itself to
recharge its batteries.
On 10 March 2006, NASA's Mars Reconnaissance Orbiter
(MRO) probe arrived in orbit to conduct a two-year science survey. The
orbiter began mapping the Martian terrain and weather to find suitable
landing sites for upcoming lander missions. The MRO captured the first
image of a series of active avalanches near the planet's north pole in 2008.
Rosetta came within 250 km of Mars during its 2007 flyby. Dawn flew by Mars in February 2009 for a gravity assist on its way to investigate Vesta and Ceres.
Phoenix landed on the north polar region of Mars on May 25, 2008. Its robotic arm dug into the Martian soil and the presence of water ice was confirmed on June 20, 2008. The mission concluded on November 10, 2008, after contact was lost. In 2008, the price of transporting material from the surface of Earth to the surface of Mars was approximately US$309,000 per kilogram.
The Mars Science Laboratory mission was launched on November 26, 2011, and it delivered the Curiosity rover on the surface of Mars on August 6, 2012 UTC. It is larger and more advanced than the Mars Exploration Rovers, with a velocity of up to 90 meters per hour (295 feet per hour).[38] Experiments include a laser chemical sampler that can deduce the composition of rocks at a distance of 7 meters.
A diagram of the Curiosity rover, which landed on Mars in 2012
MAVEN
orbiter was launched on 18 November 2013, and on 22 September 2014, it
was injected into an areocentric elliptic orbit 6,200 km (3,900 mi) by
150 km (93 mi) above the planet's surface to study its atmosphere.
Mission goals include determining how the planet's atmosphere and water,
presumed to have once been substantial, were lost over time.
The Indian Space Research Organisation (ISRO) launched their Mars Orbiter Mission
(MOM) on November 5, 2013, and it was inserted into Mars orbit on
September 24, 2014. India's ISRO is the fourth space agency to reach
Mars, after the Soviet space program, NASA and ESA. India successfully placed a spacecraft into Mars orbit, and became the first country to do so in its maiden attempt.
The ExoMars Trace Gas Orbiter arrived at Mars in 2016 and deployed the Schiaparelli EDM lander,
a test lander. Schiaparelli crashed on surface, but it transmitted key
data during its parachute descent, so the test was declared a partial
success.
Overview of missions
The following entails a brief overview of Mars exploration, oriented towards orbiters and flybys; see also Mars landing and Mars rover.
Between 1960 and 1969, the Soviet Union launched nine probes intended
to reach Mars. They all failed: three at launch; three failed to reach
near-Earth orbit; one during the burn to put the spacecraft into
trans-Mars trajectory; and two during the interplanetary orbit.
The Mars 1M
programs (sometimes dubbed Marsnik in Western media) was the first
Soviet uncrewed spacecraft interplanetary exploration program, which
consisted of two flyby probes launched towards Mars in October 1960, Mars 1960A and Mars 1960B (also known as Korabl 4 and Korabl 5
respectively). After launch, the third stage pumps on both launchers
were unable to develop enough pressure to commence ignition, so Earth
parking orbit was not achieved. The spacecraft reached an altitude of
120 km before reentry.
Mars 1962A was a Mars flyby mission, launched on October 24, 1962, and Mars 1962B
an intended first Mars lander mission, launched in late December of the
same year (1962). Both failed from either breaking up as they were
going into Earth orbit or having the upper stage explode in orbit during
the burn to put the spacecraft into trans-Mars trajectory.
Mars 1
(1962 Beta Nu 1), an automatic interplanetary spacecraft launched to
Mars on November 1, 1962, was the first probe of the Soviet Mars probe program
to achieve interplanetary orbit. Mars 1 was intended to fly by the
planet at a distance of about 11,000 km and take images of the surface
as well as send back data on cosmic radiation, micrometeoroid impacts and Mars' magnetic field, radiation environment, atmospheric structure, and possible organic compounds.
Sixty-one radio transmissions were held, initially at 2-day intervals
and later at 5-day intervals, from which a large amount of
interplanetary data was collected. On 21 March 1963, when the spacecraft
was at a distance of 106,760,000 km from Earth, on its way to Mars,
communications ceased due to failure of its antenna orientation system.
In 1964, both Soviet probe launches, of Zond 1964A on June 4, and Zond 2 on November 30, (part of the Zond program),
resulted in failures. Zond 1964A had a failure at launch, while
communication was lost with Zond 2 en route to Mars after a mid-course
maneuver, in early May 1965.
In 1969, and as part of the Mars probe program, the Soviet Union prepared two identical 5-ton orbiters called M-69, dubbed by NASA as Mars 1969A and Mars 1969B. Both probes were lost in launch-related complications with the newly developed Proton rocket.
1970s
The USSR intended to have the first artificial satellite of Mars beating the planned American Mariner 8 and Mariner 9 Mars orbiters. In May 1971, one day after Mariner 8 malfunctioned at launch and failed to reach orbit, Cosmos 419 (Mars 1971C),
a heavy probe of the Soviet Mars program M-71, also failed to launch.
This spacecraft was designed as an orbiter only, while the next two
probes of project M-71, Mars 2 and Mars 3, were multipurpose combinations of an orbiter and a lander with small skis-walking rovers
that would be the first planet rovers outside the Moon. They were
successfully launched in mid-May 1971 and reached Mars about seven
months later. On November 27, 1971, the lander of Mars 2 crash-landed
due to an on-board computer malfunction and became the first man-made
object to reach the surface of Mars. On 2 December 1971, the Mars 3
lander became the first spacecraft to achieve a soft landing, but its transmission was interrupted after 14.5 seconds.
The Mars 2 and 3 orbiters sent back a relatively large volume of
data covering the period from December 1971 to March 1972, although
transmissions continued through to August. By 22 August 1972, after
sending back data and a total of 60 pictures, Mars 2 and 3 concluded
their missions. The images and data enabled creation of surface relief
maps, and gave information on the Martian gravity and magnetic fields.
In 1973, the Soviet Union sent four more probes to Mars: the Mars 4 and Mars 5 orbiters and the Mars 6 and Mars 7
flyby/lander combinations. All missions except Mars 7 sent back data,
with Mars 5 being most successful. Mars 5 transmitted just 60 images
before a loss of pressurization in the transmitter housing ended the
mission. Mars 6 lander transmitted data during descent, but failed upon
impact. Mars 4 flew by the planet at a range of 2200 km returning one
swath of pictures and radio occultation data, which constituted the first detection of the nightside ionosphere on Mars. Mars 7 probe separated prematurely from the carrying vehicle due to a problem in the operation of one of the onboard systems (attitude control or retro-rockets) and missed the planet by 1,300 kilometres (8.7×10−6 au).
The
first close-up images taken of Mars in 1965 from Mariner 4 show an area
about 330 km across by 1200 km from limb to bottom of frame.
In 1964, NASA's Jet Propulsion Laboratory made two attempts at reaching Mars. Mariner 3 and Mariner 4
were identical spacecraft designed to carry out the first flybys of
Mars. Mariner 3 was launched on November 5, 1964, but the shroud
encasing the spacecraft atop its rocket failed to open properly, dooming
the mission. Three weeks later, on November 28, 1964, Mariner 4 was
launched successfully on a 71⁄2-month voyage to Mars.
Mariner 4 flew past Mars on July 14, 1965, providing the first
close-up photographs of another planet. The pictures, gradually played
back to Earth from a small tape recorder on the probe, showed impact
craters. It provided radically more accurate data about the planet; a
surface atmospheric pressure of about 1% of Earth's and daytime temperatures of −100 °C (−148 °F) were estimated. No magnetic field or Martian radiation belts
were detected. The new data meant redesigns for then planned Martian
landers, and showed life would have a more difficult time surviving
there than previously anticipated.
NASA continued the Mariner program with another pair of Mars flyby probes, Mariner 6 and 7.
They were sent at the next launch window, and reached the planet in
1969. During the following launch window the Mariner program again
suffered the loss of one of a pair of probes. Mariner 9 successfully entered orbit about Mars, the first spacecraft ever to do so, after the launch time failure of its sister ship, Mariner 8.
When Mariner 9 reached Mars in 1971, it and two Soviet orbiters (Mars 2
and Mars 3) found that a planet-wide dust storm was in progress. The
mission controllers used the time spent waiting for the storm to clear
to have the probe rendezvous with, and photograph, Phobos.
When the storm cleared sufficiently for Mars' surface to be
photographed by Mariner 9, the pictures returned represented a
substantial advance over previous missions. These pictures were the
first to offer more detailed evidence that liquid water might at one
time have flowed on the planetary surface. They also finally discerned
the true nature of many Martian albedo features. For example, Nix
Olympica was one of only a few features that could be seen during the
planetary duststorm, revealing it to be the highest mountain (volcano, to be exact) on any planet in the entire Solar System, and leading to its reclassification as Olympus Mons.
The Viking program launched Viking 1 and Viking 2
spacecraft to Mars in 1975; The program consisted of two orbiters and
two landers – these were the second and third spacecraft to successfully
land on Mars.
Viking 1 lander site (1st color, July 21, 1976)
Viking 2 lander site (1st color, September 5, 1976)
Viking 2 lander site (September 25, 1977)
(False color image) Frost at Viking 2 site (May 18, 1979)
Martian sunset over Chryse Planitia at Viking 1 site (August 20, 1976)
The Viking orbiters revealed that large floods of water carved deep
valleys, eroded grooves into bedrock, and traveled thousands of
kilometers. Areas of branched streams, in the southern hemisphere,
suggest that rain once fell.
Mars Pathfinder, Sojourner rover
Sojourner takes Alpha Proton X-ray Spectrometer measurements of the Yogi Rock.
Mars Pathfinder was a U.S. spacecraft that landed a base station with a roving probe on Mars on July 4, 1997. It consisted of a lander and a small 10.6-kilogram (23 lb) wheeled robotic rover named Sojourner, which was the first rover to operate on the surface of Mars.
In addition to scientific objectives, the Mars Pathfinder mission was
also a "proof-of-concept" for various technologies, such as an airbag landing system and automated obstacle avoidance, both later exploited by the Mars Exploration Rovers.
Gullies, similar to those formed on Earth, are visible on this image from Mars Global Surveyor.
After the 1992 failure of NASA's Mars Observer orbiter, NASA retooled and launched Mars Global Surveyor (MGS). Mars Global Surveyor
launched on November 7, 1996, and entered orbit on September 12, 1997.
After a year and a half trimming its orbit from a looping ellipse to a
circular track around the planet, the spacecraft began its primary
mapping mission in March 1999. It observed the planet from a
low-altitude, nearly polar orbit over the course of one complete Martian year, the equivalent of nearly two Earth years. Mars Global Surveyor
completed its primary mission on January 31, 2001, and completed
several extended mission phases until communication was lost in 2007.
The mission studied the entire Martian surface, atmosphere, and
interior, and returned more data about the red planet than all previous
Mars missions combined. The data has been archived and remains available
publicly.
A color-coded elevation map produced from data collected by Mars Global Surveyor indicating the result of floods on Mars
Among key scientific findings, Global Surveyor took pictures of gullies and debris flow features that suggest there may be current sources of liquid water, similar to an aquifer,
at or near the surface of the planet. Similar channels on Earth are
formed by flowing water, but on Mars the temperature is normally too
cold and the atmosphere too thin to sustain liquid water. Nevertheless,
many scientists hypothesize that liquid groundwater can sometimes
surface on Mars, erode gullies and channels, and pool at the bottom
before freezing and evaporating.
Magnetometer readings showed that the planet's magnetic field
is not globally generated in the planet's core, but is localized in
particular areas of the crust. New temperature data and closeup images
of the Martian moon Phobos showed that its surface is composed of
powdery material at least 1 metre (3 feet) thick, caused by millions of
years of meteoroid impacts. Data from the spacecraft's laseraltimeter gave scientists their first 3-D views of Mars' north polar ice cap in January 1999.
Faulty software uploaded to the vehicle in June 2006 caused the
spacecraft to orient its solar panels incorrectly several months later,
resulting in battery overheating and subsequent failure. On November 5, 2006, MGS lost contact with Earth. NASA ended efforts to restore communication on January 28, 2007.
In 2001, NASA's Mars Odyssey orbiter arrived at Mars. Its mission is to use spectrometers and imagers to hunt for evidence of past or present water and volcanic activity on Mars. In 2002, it was announced that the probe's gamma-ray spectrometer and neutron spectrometer had detected large amounts of hydrogen,
indicating that there are vast deposits of water ice in the upper three
meters of Mars' soil within 60° latitude of the south pole.
The orbiter entered Mars orbit on December 25, 2003, and Beagle 2
entered Mars' atmosphere the same day. However, attempts to contact the
lander failed. Communications attempts continued throughout January,
but Beagle 2 was declared lost in mid-February, and a joint inquiry was
launched by the UK and ESA. The Mars Express Orbiter confirmed the
presence of water ice and carbon dioxide ice at the planet's south pole,
while NASA had previously confirmed their presence at the north pole of
Mars.
The lander's fate remained a mystery until it was located intact on the surface of Mars in a series of images from the Mars Reconnaissance Orbiter. The images suggest that two of the spacecraft's four solar panels failed to deploy, blocking the spacecraft's communications antenna. Beagle 2 is the first British and first European probe to achieve a soft landing on Mars.
NASA's Mars Exploration Rover Mission (MER), started in 2003, was a robotic space mission involving two rovers, Spirit (MER-A) and Opportunity,
(MER-B) that explored the Martian surface geology. The mission's
scientific objective was to search for and characterize a wide range of
rocks and soils that hold clues to past water activity on Mars. The
mission was part of NASA's Mars Exploration Program, which includes
three previous successful landers: the two Viking program landers in
1976; and Mars Pathfinder probe in 1997.
The Mars Reconnaissance Orbiter (MRO) is a multipurpose spacecraft designed to conduct reconnaissance and exploration of Mars from orbit. The US$720 million spacecraft was built by Lockheed Martin under the supervision of the Jet Propulsion Laboratory, launched August 12, 2005, and entered Mars orbit on March 10, 2006.
The MRO contains a host of scientific instruments such as the HiRISE camera, CTX camera, CRISM, and SHARAD. The HiRISE camera is used to analyze Martian landforms, whereas CRISM and SHARAD can detect water, ice, and minerals
on and below the surface. Additionally, MRO is paving the way for
upcoming generations of spacecraft through daily monitoring of Martian
weather and surface conditions, searching for future landing sites, and
testing a new telecommunications system that enable it to send and
receive information at an unprecedented bitrate, compared to previous Mars spacecraft. Data transfer
to and from the spacecraft occurs faster than all previous
interplanetary missions combined and allows it to serve as an important
relay satellite for other missions.
The NASA Dawn spacecraft used the gravity of Mars in 2009 to change direction and velocity on its way to Vesta, and tested out Dawn's cameras and other instruments on Mars.
On November 8, 2011, Russia's Roscosmos launched an ambitious mission called Fobos-Grunt. It consisted of a lander aimed to retrieve a sample back to Earth from Mars' moon Phobos, and place the Chinese Yinghuo-1
probe in Mars' orbit. The Fobos-Grunt mission suffered a complete
control and communications failure shortly after launch and was left
stranded in low Earth orbit, later falling back to Earth.
The Yinghuo-1 satellite and Fobos-Grunt underwent destructive re-entry
on January 15, 2012, finally disintegrating over the Pacific Ocean.
The NASA Mars Science Laboratory mission with its rover named Curiosity, was launched on November 26, 2011, and landed on Mars on August 6, 2012, on Aeolis Palus in Gale Crater. The rover carries instruments designed to look for past or present conditions relevant to the past or present habitability of Mars.
MAVEN
NASA's MAVEN is an orbiter mission to study the upper atmosphere of Mars.
It will also serve as a communications relay satellite for robotic
landers and rovers on the surface of Mars. MAVEN was launched 18
November 2013 and reached Mars on 22 September 2014.
Mars Orbiter Mission
The Mars Orbiter Mission, also called Mangalyaan, was launched on 5 November 2013 by the Indian Space Research Organisation (ISRO).
It was successfully inserted into Martian orbit on 24 September 2014.
The mission is a technology demonstrator, and as secondary objective, it
will also study the Martian atmosphere. This is India's first mission
to Mars, and with it, ISRO became the fourth space agency to
successfully reach Mars after the Soviet Union, NASA (USA) and ESA (Europe). It was completed in a record low budget of $71 million, making it the least-expensive Mars mission to date. The mission concluded on September 27, 2022, after contact was lost.
The ExoMars Trace Gas Orbiter
is an atmospheric research orbiter built in collaboration between ESA
and Roscosmos. It was injected into Mars orbit on 19 October 2016 to
gain a better understanding of methane (CH 4)
and other trace gases present in the Martian atmosphere that could be
evidence for possible biological or geological activity. The
Schiaparelli EDM lander was destroyed when trying to land on the surface
of Mars.
InSight and MarCO
NASA missions to Mars (28 September 2021) (Perseverance rover; Ingenuity Mars helicopter; InSight lander; Odyssey orbiter; MAVEN orbiter; Curiosity rover; Mars Reconnaissance Orbiter)
In August 2012, NASA selected InSight, a $425 million lander mission with a heat flow probe and seismometer, to determine the deep interior structure of Mars. InSight landed successfully on Mars on 26 November 2018. Valuable data on the atmosphere, surface and the planet's interior were gathered by Insight. Insight's mission was declared as ended on 21 December 2022.
Two flyby CubeSats called MarCO were launched with InSight on 5 May 2018 to provide real-time telemetry during the entry and landing of InSight. The CubeSats separated from the Atlas V booster 1.5 hours after launch and traveled their own trajectories to Mars.
Hope
The United Arab Emirates launched the Hope Mars Mission, in July 2020 on the Japanese H-IIA booster. It was successfully placed into orbit on 9 February 2021. It is studying the Martian atmosphere and weather.
Tianwen-1 and Zhurong rover
Tianwen-1
was a Chinese mission launched on 23 July 2020 which included an
orbiter, a lander, and a 240-kilogram (530 lb) rover along with a
package of deployable and remote cameras. Tianwen-1 entered orbit on 10 February 2021 and the Zhurong rover successfully landed on 14 May 2021 and deployed on 22 May 2021. As of May 2022, Zhurong had been in operation for 347 Martian days and had traveled 1,921 meters across Mars.
Mars 2020, Perseverance rover, Ingenuity helicopter
Mapping Perseverance's samples collected to date
The Mars 2020 mission by NASA was launched on 30 July 2020 on a United Launch Alliance Atlas V rocket from Cape Canaveral. It is based on the Mars Science Laboratory design. The scientific payload is focused on astrobiology. It includes the Perseverance rover and the Ingenuity helicopter. Unlike older rovers that relied on solar power, Perseverance
is nuclear powered, to survive longer than its predecessors in this
harsh, dusty environment. The car-size rover weighs about 1 ton, with a
robotic arm that reaches about 7 feet (2.1 m), zoom cameras, a chemical
analyzer and a rock drill.
After traveling 293 million miles (471 million km) to reach Mars over the course of more than six months, Perseverance
successfully landed on February 18, 2021. Its initial mission is set
for at least one Martian year, or 687 Earth days. It will search for
signs of ancient life and explore the red planet's surface.
As of October 19, 2021, Perseverance had captured the
first sounds from Mars. Recordings consisted of five hours of Martian
wind gusts, rover wheels crunching over gravel, and motors whirring as
the spacecraft moves its arm. The sounds give researchers clues about
the atmosphere, such as how far sound travels on the planet.
As part of the ExoMars program, ESA and the Roscosmos planned to send the Rosalind Franklin rover in 2022 to search for evidence of past or present microscopic life on Mars. The lander that was planned to deliver the rover is called Kazachok,
and it would have performed scientific studies for about 2 years. This
mission has been delayed indefinitely as a result of the 2022 Russian invasion of Ukraine.
EscaPADE (Escape and Plasma Acceleration and Dynamics Explorers) by the University of California, Berkeley, is a planned twin-spacecraft NASA
Mars orbiter mission to study the structure, composition, variability
and dynamics of Mars' magnetosphere and atmospheric escape processes. The EscaPADE orbiters were originally to be launched in 2022 as secondary payloads on a Falcon Heavy together with the Psyche and Janus missions, but will now be remanifested on different flight, yet to be determined.
The Finnish-Russian Mars MetNet
concept would use multiple small meteorological stations on Mars to
establish a widespread observation network to investigate the planet's
atmospheric structure, physics and meteorology. The MetNet precursor or demonstrator was considered for a piggyback launch on Fobos-Grunt, and on the two proposed to fly on the 2016 and 2020 ExoMars spacecraft.
Tianwen-3 is a Chinese mission to return samples of Martian soil to Earth.
The mission would launch in late 2028, with a lander and ascent vehicle
and an orbiter and return module launched separately on two rockets.
The samples would be returned to Earth by July 2031.
NASA-ESA Mars Sample Return
is a three-launch architecture concept for a sample return mission,
which uses a rover to cache small samples, a Mars ascent stage to send
it into orbit, and an orbiter to rendezvous with it above Mars and take
it to Earth. Solar-electric propulsion could allow a one launch sample return instead of three.
Other future mission concepts include polar probes, Martian aircraft and a network of small meteorological stations. Longterm areas of study may include Martian lava tubes, resource utilization, and electronic charge carriers in rocks. Micromissions are another possibility, such as piggybacking a small spacecraft on an Ariane 5 rocket and using a lunar gravity assist to get to Mars.
Human mission proposals
Concept for NASA Design Reference Mission Architecture 5.0 (2009)
The human exploration of Mars has been an aspiration since the earliest days of modern rocketry; Robert H. Goddard credits the idea of reaching Mars as his own inspiration to study the physics and engineering of space flight. Proposals for human exploration of Mars have been made throughout the history of space exploration;
currently there are multiple active plans and programs to put humans on
Mars within the next ten to thirty years, both governmental and
private, some of which are listed below.
NASA
Artistic simulated photo looking out a portal spacecraft coming for a Mars landing
Human exploration by the United States was identified as a long-term goal in the Vision for Space Exploration announced in 2004 by then US President George W. Bush. The planned Orion
spacecraft would be used to send a human expedition to Earth's moon by
2020 as a stepping stone to a Mars expedition. On September 28, 2007,
NASA administrator Michael D. Griffin stated that NASA aims to put a person on Mars by 2037.
On December 2, 2014, NASA's Advanced Human Exploration Systems
and Operations Mission Director Jason Crusan and Deputy Associate
Administrator for Programs James Reuthner announced tentative support
for the Boeing
"Affordable Mars Mission Design" including radiation shielding,
centrifugal artificial gravity, in-transit consumable resupply, and a
lander which can return.Reuthner suggested that if adequate funding was forthcoming, the proposed mission would be expected in the early 2030s.
On October 8, 2015, NASA
published its official plan for human exploration and colonization of
Mars. They called it "Journey to Mars". The plan operates through three
distinct phases leading up to fully sustained colonization.
The first stage, already underway, is the "Earth Reliant" phase. This phase continues utilizing the International Space Station until 2024; validating deep space technologies and studying the effects of long-duration space missions on the human body.
The second stage, "Proving Ground," moves away from Earth reliance and ventures into cislunar space
for most of its tasks. This is when NASA plans to capture an asteroid,
test deep space habitation facilities, and validate the capabilities
required for human exploration of Mars. Finally, phase three is the
transition to independence from Earth resources.
The last stage, the "Earth Independent" phase, includes long-term
missions on the lunar surface which leverage surface habitats that only
require routine maintenance, and the harvesting of Martian resources for
fuel, water, and building materials. NASA is still aiming for human
missions to Mars in the 2030s, though Earth independence could take
decades longer.
Journey to Mars – Science, Exploration, Technology
On August 28, 2015, NASA funded a year-long simulation to study the
effects of a year-long Mars mission on six scientists. The scientists
lived in a biodome on a Mauna Loa mountain in Hawaii with limited
connection to the outside world and were only allowed outside if they
were wearing spacesuits.
NASA's human Mars exploration plans have evolved through the NASA Mars Design Reference Missions, a series of design studies for human exploration of Mars.
In 2017, the focus of NASA shifted to a return to the Moon by 2024 with the Artemis program, a flight to Mars could follow after this project.
SpaceX
The long-term goal of the private corporation SpaceX is the establishment of routine flights to Mars to enable colonization. To this end, the company is developing Starship, a spacecraft capable of crew transportation to Mars and other celestial bodies, along with its booster Super Heavy.
In 2017 SpaceX announced plans to send two uncrewed Starships to Mars
by 2022, followed by two more uncrewed flights and two crewed flights in
2024. Starship is planned to have a payload of at least 100 tonnes. Starship is designed to use a combination of aerobraking and propulsive descent, utilizing fuel produced from a Mars (in situ resource utilization) facility. As of mid 2021, the Starship development program has seen successful testing of several Starship prototypes.
Zubrin
Mars Direct, a low-cost human mission proposed by Robert Zubrin, founder of the Mars Society, would use heavy-lift Saturn V class rockets, such as the Ares V, to skip orbital construction, LEO rendezvous, and lunar fuel depots. A modified proposal, called "Mars to Stay", involves not returning the first immigrant explorers immediately, if ever (see Colonization of Mars).
The challenge, complexity and length of Mars missions have led to many mission failures. The high failure rate of missions attempting to explore Mars is informally called the "Mars Curse" or "Martian Curse". The phrase "Galactic Ghoul" or "Great Galactic Ghoul" refers to a fictitious space monster that subsists on a diet of Mars probes, and is sometimes facetiously used to "explain" the recurring difficulties.
Two Soviet probes were sent to Mars in 1988 as part of the Phobos program. Phobos 1
operated normally until an expected communications session on 2
September 1988 failed to occur. The problem was traced to a software
error, which deactivated Phobos 1's attitude thrusters, causing the
spacecraft's solar arrays to no longer point at the Sun, depleting
Phobos 1's batteries. Phobos 2
operated normally throughout its cruise and Mars orbital insertion
phases on January 29, 1989, gathering data on the Sun, interplanetary
medium, Mars, and Phobos. Shortly before the final phase of the mission –
during which the spacecraft was to approach within 50 m of Phobos'
surface and release two landers, one a mobile 'hopper', the other a
stationary platform – contact with Phobos 2 was lost. The mission ended
when the spacecraft signal failed to be successfully reacquired on March
27, 1989. The cause of the failure was determined to be a malfunction
of the on-board computer.
Just a few years later in 1992 Mars Observer, launched by NASA, failed as it approached Mars. Mars 96,
an orbiter launched on November 16, 1996, by Russia failed, when the
planned second burn of the Block D-2 fourth stage did not occur.
Following the success of Global Surveyor and Pathfinder, another spate of failures occurred in 1998 and 1999, with the Japanese Nozomi orbiter and NASA's Mars Climate Orbiter, Mars Polar Lander, and Deep Space 2 penetrators all suffering various fatal errors. The Mars Climate Orbiter was noted for mixing up U.S. customary units with metric units, causing the orbiter to burn up while entering Mars' atmosphere.
The European Space Agency has also attempted to land two probes on the Martian surface; Beagle 2, a British-built lander that failed to deploy its solar arrays properly after touchdown in December 2003, and Schiaparelli, which was flown along the ExoMars Trace Gas Orbiter. Contact with the Schiaparelli EDM lander was lost 50 seconds before touchdown. It was later confirmed that the lander struck the surface at a high velocity, possibly exploding.















.jpg)
























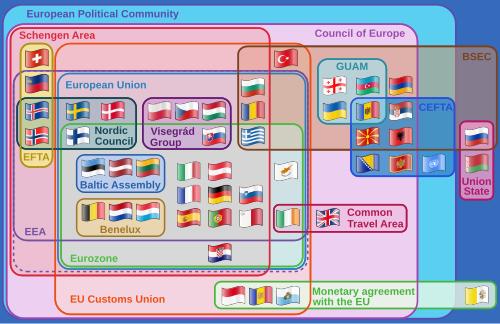



{kind=link}