From Wikipedia, the free encyclopedia
Numerical weather prediction (
NWP) uses
mathematical models of the atmosphere and oceans to
predict the weather based on current weather conditions. Though first attempted in the 1920s, it was not until the advent of
computer simulation
in the 1950s that numerical weather predictions produced realistic
results. A number of global and regional forecast models are run in
different countries worldwide, using current weather observations
relayed from
radiosondes,
weather satellites and other observing systems as inputs.
Mathematical models based on the same physical principles can be used
to generate either short-term weather forecasts or longer-term climate
predictions; the latter are widely applied for understanding and
projecting
climate change. The improvements made to regional models have allowed for significant improvements in
tropical cyclone track and
air quality
forecasts; however, atmospheric models perform poorly at handling
processes that occur in a relatively constricted area, such as
wildfires.
Manipulating the vast datasets and performing the complex
calculations necessary to modern numerical weather prediction requires
some of the most powerful
supercomputers in the world. Even with the increasing power of supercomputers, the
forecast skill
of numerical weather models extends to only about six days. Factors
affecting the accuracy of numerical predictions include the density and
quality of observations used as input to the forecasts, along with
deficiencies in the numerical models themselves. Post-processing
techniques such as
model output statistics (MOS) have been developed to improve the handling of errors in numerical predictions.
A more fundamental problem lies in the
chaotic nature of the
partial differential equations
that govern the atmosphere. It is impossible to solve these equations
exactly, and small errors grow with time (doubling about every five
days). Present understanding is that this chaotic behavior limits
accurate forecasts to about 14 days even with perfectly accurate input
data and a flawless model. In addition, the partial differential
equations used in the model need to be supplemented with
parameterizations for
solar radiation,
moist processes (clouds and
precipitation),
heat exchange,
soil, vegetation, surface water, and the effects of terrain. In an
effort to quantify the large amount of inherent uncertainty remaining in
numerical predictions,
ensemble forecasts
have been used since the 1990s to help gauge the confidence in the
forecast, and to obtain useful results farther into the future than
otherwise possible. This approach analyzes multiple forecasts created
with an individual forecast model or multiple models.
History

The
history of numerical weather prediction began in the 1920s through the efforts of
Lewis Fry Richardson, who used procedures originally developed by
Vilhelm Bjerknes[1]
to produce by hand a six-hour forecast for the state of the atmosphere
over two points in central Europe, taking at least six weeks to do so.
[1][2] It was not until the advent of the computer and
computer simulations that computation time was reduced to less than the forecast period itself. The
ENIAC
was used to create the first weather forecasts via computer in 1950,
based on a highly simplified approximation to the atmospheric governing
equations.
[3][4] In 1954,
Carl-Gustav Rossby's group at the
Swedish Meteorological and Hydrological Institute used the same model to produce the first operational forecast (i.e., a routine prediction for practical use).
[5]
Operational numerical weather prediction in the United States began in
1955 under the Joint Numerical Weather Prediction Unit (JNWPU), a joint
project by the
U.S. Air Force,
Navy and
Weather Bureau.
[6] In 1956,
Norman Phillips
developed a mathematical model which could realistically depict monthly
and seasonal patterns in the troposphere; this became the first
successful
climate model.
[7][8] Following Phillips' work, several groups began working to create
general circulation models.
[9]
The first general circulation climate model that combined both oceanic
and atmospheric processes was developed in the late 1960s at the
NOAA Geophysical Fluid Dynamics Laboratory.
[10]
As computers have become more powerful, the size of the initial data sets has increased and
newer atmospheric models
have been developed to take advantage of the added available computing
power. These newer models include more physical processes in the
simplifications of the
equations of motion in numerical simulations of the atmosphere.
[5] In 1966,
West Germany and the United States began producing operational forecasts based on
primitive-equation models, followed by the United Kingdom in 1972 and Australia in 1977.
[1][11] The development of limited area (regional) models facilitated advances in forecasting the tracks of
tropical cyclones as well as
air quality in the 1970s and 1980s.
[12][13]
By the early 1980s models began to include the interactions of soil and
vegetation with the atmosphere, which led to more realistic forecasts.
[14]
The output of forecast models based on
atmospheric dynamics
is unable to resolve some details of the weather near the Earth's
surface. As such, a statistical relationship between the output of a
numerical weather model and the ensuing conditions at the ground was
developed in the 1970s and 1980s, known as
model output statistics (MOS).
[15][16]
Starting in the 1990s, model ensemble forecasts have been used to help
define the forecast uncertainty and to extend the window in which
numerical weather forecasting is viable farther into the future than
otherwise possible.
[17][18][19]
Initialization
Weather reconnaissance aircraft, such as this
WP-3D Orion, provide data that is then used in numerical weather forecasts.
The
atmosphere is a
fluid.
As such, the idea of numerical weather prediction is to sample the
state of the fluid at a given time and use the equations of
fluid dynamics and
thermodynamics
to estimate the state of the fluid at some time in the future. The
process of entering observation data into the model to generate
initial conditions is called
initialization.
On land, terrain maps available at resolutions down to 1 kilometer
(0.6 mi) globally are used to help model atmospheric circulations within
regions of rugged topography, in order to better depict features such
as downslope winds,
mountain waves and related cloudiness that affects incoming solar radiation.
[20] The main inputs from country-based weather services are observations from devices (called
radiosondes) in weather balloons that measure various atmospheric parameters and transmits them to a fixed receiver, as well as from
weather satellites. The
World Meteorological Organization
acts to standardize the instrumentation, observing practices and timing
of these observations worldwide. Stations either report hourly in
METAR reports,
[21] or every six hours in
SYNOP reports.
[22] These observations are irregularly spaced, so they are processed by
data assimilation
and objective analysis methods, which perform quality control and
obtain values at locations usable by the model's mathematical
algorithms.
[23] The data are then used in the model as the starting point for a forecast.
[24]
A variety of methods are used to gather observational data for use in
numerical models. Sites launch radiosondes in weather balloons which
rise through the
troposphere and well into the
stratosphere.
[25] Information from weather satellites is used where traditional data sources are not available. Commerce provides
pilot reports along aircraft routes
[26] and ship reports along shipping routes.
[27] Research projects use
reconnaissance aircraft to fly in and around weather systems of interest, such as
tropical cyclones.
[28][29]
Reconnaissance aircraft are also flown over the open oceans during the
cold season into systems which cause significant uncertainty in forecast
guidance, or are expected to be of high impact from three to seven days
into the future over the downstream continent.
[30] Sea ice began to be initialized in forecast models in 1971.
[31] Efforts to involve
sea surface temperature in model initialization began in 1972 due to its role in modulating weather in higher latitudes of the Pacific.
[32]
Computation

An atmospheric model is a computer program that produces
meteorological information for future times at given locations and altitudes. Within any modern model is a set of equations, known as the
primitive equations, used to predict the future state of the atmosphere.
[33] These equations—along with the
ideal gas law—are used to evolve the
density,
pressure, and
potential temperature scalar fields and the air
velocity (wind)
vector field of the atmosphere through time. Additional transport equations for pollutants and other
aerosols are included in some primitive-equation high-resolution models as well.
[34] The equations used are
nonlinear partial differential equations which are impossible to solve exactly through analytical methods,
[35] with the exception of a few idealized cases.
[36]
Therefore, numerical methods obtain approximate solutions. Different
models use different solution methods: some global models and almost all
regional models use
finite difference methods for all three spatial dimensions, while other global models and a few regional models use
spectral methods for the horizontal dimensions and finite-difference methods in the vertical.
[35]
These equations are initialized from the analysis data and rates of
change are determined. These rates of change predict the state of the
atmosphere a short time into the future; the time increment for this
prediction is called a
time step. This future atmospheric state
is then used as the starting point for another application of the
predictive equations to find new rates of change, and these new rates of
change predict the atmosphere at a yet further time step into the
future. This time stepping is repeated until the solution reaches the
desired forecast time. The length of the time step chosen within the
model is related to the distance between the points on the computational
grid, and is chosen to maintain
numerical stability.
[37] Time steps for global models are on the order of tens of minutes,
[38] while time steps for regional models are between one and four minutes.
[39] The global models are run at varying times into the future. The
UKMET Unified Model is run six days into the future,
[40] while the
European Centre for Medium-Range Weather Forecasts'
Integrated Forecast System and
Environment Canada's
Global Environmental Multiscale Model both run out to ten days into the future,
[41] and the
Global Forecast System model run by the
Environmental Modeling Center is run sixteen days into the future.
[42] The visual output produced by a model solution is known as a
prognostic chart, or
prog.
[43]
Parameterization
Field of
cumulus clouds, which are parameterized since they are too small to be explicitly included within numerical weather prediction
Some meteorological processes are too small-scale or too complex to
be explicitly included in numerical weather prediction models.
Parameterization
is a procedure for representing these processes by relating them to
variables on the scales that the model resolves. For example, the
gridboxes in weather and climate models have sides that are between 5
kilometers (3 mi) and 300 kilometers (200 mi) in length. A typical
cumulus cloud
has a scale of less than 1 kilometer (0.6 mi), and would require a grid
even finer than this to be represented physically by the equations of
fluid motion. Therefore, the processes that such
clouds
represent are parameterized, by processes of various sophistication. In
the earliest models, if a column of air within a model gridbox was
conditionally unstable (essentially, the bottom was warmer and moister
than the top) and the water vapor content at any point within the column
became saturated then it would be overturned (the warm, moist air would
begin rising), and the air in that vertical column mixed. More
sophisticated schemes recognize that only some portions of the box might
convect and that
entrainment
and other processes occur. Weather models that have gridboxes with
sides between 5 and 25 kilometers (3 and 16 mi) can explicitly represent
convective clouds, although they need to parameterize
cloud microphysics which occur at a smaller scale.
[44] The formation of large-scale (
stratus-type) clouds is more physically based; they form when the
relative humidity
reaches some prescribed value. Sub-grid scale processes need to be
taken into account. Rather than assuming that clouds form at 100%
relative humidity, the
cloud fraction can be related to a critical value of relative humidity less than 100%,
[45] reflecting the sub grid scale variation that occurs in the real world.
The amount of solar radiation reaching the ground, as well as the
formation of cloud droplets occur on the molecular scale, and so they
must be parameterized before they can be included in the model.
Atmospheric drag produced by mountains must also be parameterized, as the limitations in the resolution of
elevation contours produce significant underestimates of the drag.
[46]
This method of parameterization is also done for the surface flux of
energy between the ocean and the atmosphere, in order to determine
realistic sea surface temperatures and type of sea ice found near the
ocean's surface.
[47] Sun angle as well as the impact of multiple cloud layers is taken into account.
[48]
Soil type, vegetation type, and soil moisture all determine how much
radiation goes into warming and how much moisture is drawn up into the
adjacent atmosphere, and thus it is important to parameterize their
contribution to these processes.
[49]
Within air quality models, parameterizations take into account
atmospheric emissions from multiple relatively tiny sources (e.g. roads,
fields, factories) within specific grid boxes.
[50]
Domains
A cross-section of the atmosphere over terrain with a sigma-coordinate
representation shown. Mesoscale models divide the atmosphere vertically
using representations similar to the one shown here.
The horizontal
domain of a model is either
global, covering the entire Earth, or
regional, covering only part of the Earth. Regional models (also known as
limited-area
models, or LAMs) allow for the use of finer grid spacing than global
models because the available computational resources are focused on a
specific area instead of being spread over the globe. This allows
regional models to resolve explicitly smaller-scale meteorological
phenomena that cannot be represented on the coarser grid of a global
model. Regional models use a global model to specify conditions at the
edge of their domain (
boundary conditions)
in order to allow systems from outside the regional model domain to
move into its area. Uncertainty and errors within regional models are
introduced by the global model used for the boundary conditions of the
edge of the regional model, as well as errors attributable to the
regional model itself.
[51]
Coordinate systems
Horizontal coordinates
Horizontal position may be expressed directly in
geographic coordinates (
latitude and
longitude) for global models or in a
map projection planar coordinates for regional models.
Vertical coordinates
The vertical coordinate is handled in various ways. Lewis Fry Richardson's 1922 model used geometric height (

) as the vertical coordinate. Later models substituted the geometric
coordinate with a pressure coordinate system, in which the
geopotential heights of constant-pressure surfaces become
dependent variables, greatly simplifying the primitive equations.
[52] This correlation between coordinate systems can be made since pressure decreases with height through the
Earth's atmosphere.
[53]
The first model used for operational forecasts, the single-layer
barotropic model, used a single pressure coordinate at the 500-millibar
(about 5,500 m (18,000 ft)) level,
[3] and thus was essentially two-dimensional. High-resolution models—also called
mesoscale models—such as the
Weather Research and Forecasting model tend to use normalized pressure coordinates referred to as
sigma coordinates.
[54] This coordinate system receives its name from the
independent variable 
used to
scale
atmospheric pressures with respect to the pressure at the surface, and
in some cases also with the pressure at the top of the domain.
[55]
Model output statistics
Because forecast models based upon the equations for atmospheric
dynamics do not perfectly determine weather conditions, statistical
methods have been developed to attempt to correct the forecasts.
Statistical models were created based upon the three-dimensional fields
produced by numerical weather models, surface observations and the
climatological conditions for specific locations. These statistical
models are collectively referred to as
model output statistics (MOS),
[56] and were developed by the
National Weather Service for their suite of weather forecasting models in the late 1960s.
[15][57]
Model output statistics differ from the
perfect prog technique, which assumes that the output of numerical weather prediction guidance is perfect.
[58]
MOS can correct for local effects that cannot be resolved by the model
due to insufficient grid resolution, as well as model biases. Because
MOS is run after its respective global or regional model, its production
is known as post-processing. Forecast parameters within MOS include
maximum and minimum temperatures, percentage chance of rain within a
several hour period, precipitation amount expected, chance that the
precipitation will be frozen in nature, chance for thunderstorms,
cloudiness, and surface winds.
[59]
Ensembles

In 1963,
Edward Lorenz discovered the
chaotic nature of the
fluid dynamics equations involved in weather forecasting.
[60]
Extremely small errors in temperature, winds, or other initial inputs
given to numerical models will amplify and double every five days,
[60]
making it impossible for long-range forecasts—those made more than two
weeks in advance—to predict the state of the atmosphere with any degree
of
forecast skill.
Furthermore, existing observation networks have poor coverage in some
regions (for example, over large bodies of water such as the Pacific
Ocean), which introduces uncertainty into the true initial state of the
atmosphere. While a set of equations, known as the
Liouville equations,
exists to determine the initial uncertainty in the model
initialization, the equations are too complex to run in real-time, even
with the use of supercomputers.
[61] These uncertainties limit forecast model accuracy to about five or six days into the future.
[62][63]
Edward Epstein
recognized in 1969 that the atmosphere could not be completely
described with a single forecast run due to inherent uncertainty, and
proposed using an
ensemble of
stochastic Monte Carlo simulations to produce
means and
variances for the state of the atmosphere.
[64] Although this early example of an ensemble showed skill, in 1974
Cecil Leith showed that they produced adequate forecasts only when the ensemble
probability distribution was a representative sample of the probability distribution in the atmosphere.
[65]
Since the 1990s,
ensemble forecasts have been used
operationally (as routine forecasts) to account for the stochastic
nature of weather processes – that is, to resolve their inherent
uncertainty. This method involves analyzing multiple forecasts created
with an individual forecast model by using different physical
parametrizations or varying initial conditions.
[61] Starting in 1992 with
ensemble forecasts prepared by the
European Centre for Medium-Range Weather Forecasts (ECMWF) and the
National Centers for Environmental Prediction,
model ensemble forecasts have been used to help define the forecast
uncertainty and to extend the window in which numerical weather
forecasting is viable farther into the future than otherwise possible.
[17][18][19] The ECMWF model, the Ensemble Prediction System,
[18] uses
singular vectors to simulate the initial
probability density, while the NCEP ensemble, the Global Ensemble Forecasting System, uses a technique known as
vector breeding.
[17][19] The UK
Met Office runs global and regional ensemble forecasts where perturbations to initial conditions are produced using a
Kalman filter.
[66] There are 24 ensemble members in the Met Office Global and Regional Ensemble Prediction System (MOGREPS).
In a single model-based approach, the ensemble forecast is usually
evaluated in terms of an average of the individual forecasts concerning
one forecast variable, as well as the degree of agreement between
various forecasts within the ensemble system, as represented by their
overall spread. Ensemble spread is diagnosed through tools such as
spaghetti diagrams,
which show the dispersion of one quantity on prognostic charts for
specific time steps in the future. Another tool where ensemble spread is
used is a
meteogram,
which shows the dispersion in the forecast of one quantity for one
specific location. It is common for the ensemble spread to be too small
to include the weather that actually occurs, which can lead to
forecasters misdiagnosing model uncertainty;
[67] this problem becomes particularly severe for forecasts of the weather about ten days in advance.
[68]
When ensemble spread is small and the forecast solutions are consistent
within multiple model runs, forecasters perceive more confidence in the
ensemble mean, and the forecast in general.
[67] Despite this perception, a
spread-skill relationship is often weak or not found, as spread-error
correlations are normally less than 0.6, and only under special circumstances range between 0.6–0.7.
[69] The relationship between ensemble spread and
forecast skill varies substantially depending on such factors as the forecast model and the region for which the forecast is made.
In the same way that many forecasts from a single model can be used
to form an ensemble, multiple models may also be combined to produce an
ensemble forecast. This approach is called
multi-model ensemble forecasting, and it has been shown to improve forecasts when compared to a single model-based approach.
[70] Models within a multi-model ensemble can be adjusted for their various biases, which is a process known as
superensemble forecasting. This type of forecast significantly reduces errors in model output.
[71]
Applications
Air quality modeling
Air quality
forecasting attempts to predict when the concentrations of pollutants
will attain levels that are hazardous to public health. The
concentration of pollutants in the atmosphere is determined by their
transport, or
mean velocity of movement through the atmosphere, their
diffusion,
chemical transformation, and ground
deposition.
[72] In addition to pollutant source and terrain information, these models require data about the state of the
fluid flow in the atmosphere to determine its transport and diffusion.
[73] Meteorological conditions such as
thermal inversions can prevent surface air from rising, trapping pollutants near the surface,
[74]
which makes accurate forecasts of such events crucial for air quality
modeling. Urban air quality models require a very fine computational
mesh, requiring the use of high-resolution mesoscale weather models; in
spite of this, the quality of numerical weather guidance is the main
uncertainty in air quality forecasts.
[73]
Climate modeling
A General Circulation Model (GCM) is a
mathematical model that can be used in computer simulations of the global circulation of a planetary
atmosphere
or ocean. An atmospheric general circulation model (AGCM) is
essentially the same as a global numerical weather prediction model, and
some (such as the one used in the UK Unified Model) can be configured
for both short-term weather forecasts and longer-term climate
predictions. Along with
sea ice
and land-surface components, AGCMs and oceanic GCMs (OGCM) are key
components of global climate models, and are widely applied for
understanding the
climate and projecting
climate change.
For aspects of climate change, a range of man-made chemical emission
scenarios can be fed into the climate models to see how an enhanced
greenhouse effect would modify the Earth's climate.
[75] Versions designed for climate applications with time scales of decades to centuries were originally created in 1969 by
Syukuro Manabe and
Kirk Bryan at the
Geophysical Fluid Dynamics Laboratory in
Princeton, New Jersey.
[76]
When run for multiple decades, computational limitations mean that the
models must use a coarse grid that leaves smaller-scale interactions
unresolved.
[77]
Ocean surface modeling
NOAA Wavewatch III 120-hour wind and wave forecast for the North Atlantic
The transfer of energy between the wind blowing over the surface of
an ocean and the ocean's upper layer is an important element in wave
dynamics.
[78] The
spectral wave transport equation
is used to describe the change in wave spectrum over changing
topography. It simulates wave generation, wave movement (propagation
within a fluid),
wave shoaling,
refraction, energy transfer between waves, and wave dissipation.
[79]
Since surface winds are the primary forcing mechanism in the spectral
wave transport equation, ocean wave models use information produced by
numerical weather prediction models as inputs to determine how much
energy is transferred from the atmosphere into the layer at the surface
of the ocean. Along with dissipation of energy through
whitecaps and
resonance between waves, surface winds from numerical weather models allow for more accurate predictions of the state of the sea surface.
[80]
Tropical cyclone forecasting
Tropical cyclone forecasting also relies on data provided by numerical weather models. Three main classes of
tropical cyclone guidance models
exist: Statistical models are based on an analysis of storm behavior
using climatology, and correlate a storm's position and date to produce a
forecast that is not based on the physics of the atmosphere at the
time. Dynamical models are numerical models that solve the governing
equations of fluid flow in the atmosphere; they are based on the same
principles as other limited-area numerical weather prediction models but
may include special computational techniques such as refined spatial
domains that move along with the cyclone. Models that use elements of
both approaches are called statistical-dynamical models.
[81]
In 1978, the first
hurricane-tracking model based on
atmospheric dynamics—the movable fine-mesh (MFM) model—began operating.
[12] Within the field of
tropical cyclone track forecasting,
despite the ever-improving dynamical model guidance which occurred with
increased computational power, it was not until the 1980s when
numerical weather prediction showed
skill, and until the 1990s when it consistently outperformed
statistical or simple dynamical models.
[82]
Predictions of the intensity of a tropical cyclone based on numerical
weather prediction continue to be a challenge, since statistical methods
continue to show higher skill over dynamical guidance.
[83]
Wildfire modeling
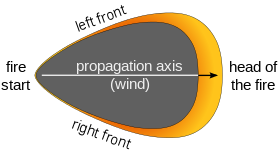
A simple wildfire propagation model
On a molecular scale, there are two main competing reaction processes involved in the degradation of
cellulose, or wood fuels, in
wildfires. When there is a low amount of moisture in a cellulose fiber,
volatilization of the fuel occurs; this process will generate intermediate gaseous products that will ultimately be the source of
combustion. When moisture is present—or when enough heat is being carried away from the fiber,
charring occurs. The
chemical kinetics
of both reactions indicate that there is a point at which the level of
moisture is low enough—and/or heating rates high enough—for combustion
processes become self-sufficient. Consequently, changes in wind speed,
direction, moisture, temperature, or
lapse rate
at different levels of the atmosphere can have a significant impact on
the behavior and growth of a wildfire. Since the wildfire acts as a heat
source to the atmospheric flow, the wildfire can modify local
advection patterns, introducing a
feedback loop between the fire and the atmosphere.
[84]
A simplified two-dimensional model for the spread of wildfires that used
convection to represent the effects of wind and terrain, as well as
radiative heat transfer as the dominant method of heat transport led to
reaction-diffusion systems of
partial differential equations.
[85][86] More complex models join numerical weather models or
computational fluid dynamics models with a wildfire component which allow the feedback effects between the fire and the atmosphere to be estimated.
[84]
The additional complexity in the latter class of models translates to a
corresponding increase in their computer power requirements. In fact, a
full three-dimensional treatment of
combustion via
direct numerical simulation
at scales relevant for atmospheric modeling is not currently practical
because of the excessive computational cost such a simulation would
require. Numerical weather models have limited forecast skill at spatial
resolutions under 1 kilometer (0.6 mi), forcing complex wildfire models
to parameterize the fire in order to calculate how the winds will be
modified locally by the wildfire, and to use those modified winds to
determine the rate at which the fire will spread locally.
[87][88][89] Although models such as
Los Alamos' FIRETEC solve for the concentrations of fuel and
oxygen,
the computational grid cannot be fine enough to resolve the combustion
reaction, so approximations must be made for the temperature
distribution within each grid cell, as well as for the combustion
reaction rates themselves.













.svg)
