
The
Blue Gene/P supercomputer at
Argonne National Lab runs over 250,000 processors using normal data center air conditioning, grouped in 72 racks/cabinets connected by a high-speed optical network
[1]
A
supercomputer is a computer with a high-level computational capacity compared to a general-purpose computer. Performance of a supercomputer is measured in
floating point operations per second (
FLOPS) instead of
million instructions per second (MIPS). As of 2015, there are supercomputers which can perform up to quadrillions of FLOPS.
[2]
Supercomputers were introduced in the 1960s, made initially, and for decades primarily, by
Seymour Cray at
Control Data Corporation (CDC),
Cray Research and subsequent companies bearing his name or monogram. While the supercomputers of the 1970s used only a few
processors, in the 1990s machines with thousands of processors began to appear and, by the end of the 20th century,
massively parallel supercomputers with tens of thousands of "off-the-shelf" processors were the norm.
[3][4] Since its introduction in June 2013, China's
Tianhe-2 supercomputer is currently the
fastest in the world at 33.86 petaFLOPS (PFLOPS), or 33.86 quadrillions of FLOPS.
Supercomputers play an important role in the field of
computational science, and are used for a wide range of computationally intensive tasks in various fields, including
quantum mechanics,
weather forecasting,
climate research,
oil and gas exploration,
molecular modeling (computing the structures and properties of chemical compounds, biological
macromolecules, polymers, and crystals), and physical simulations (such as simulations of the early moments of the universe, airplane and spacecraft aerodynamics, the detonation of
nuclear weapons, and
nuclear fusion). Throughout their history, they have been essential in the field of
cryptanalysis.
[5]
Systems with massive numbers of processors generally take one of the two paths: in one approach (e.g., in
distributed computing), a large number of discrete computers (e.g.,
laptops) distributed across a network (e.g., the
Internet) devote some or all of their time to solving a common problem; each individual computer (client) receives and completes many small tasks, reporting the results to a central server which integrates the task results from all the clients into the overall solution.
[6][7] In another approach, a large number of dedicated processors are placed in close proximity to each other (e.g. in a
computer cluster); this saves considerable time moving data around and makes it possible for the processors to work together (rather than on separate tasks), for example in
mesh and
hypercube architectures.
The use of
multi-core processors combined with
centralization is an emerging trend; one can think of this as a small cluster (the multicore processor in a
smartphone,
tablet, laptop, etc.) that both depends upon and contributes to
the cloud.
[8][9]
History

The history of supercomputing goes back to the 1960s, with the
Atlas at the
University of Manchester and a series of computers at
Control Data Corporation (CDC), designed by
Seymour Cray. These used innovative designs and parallelism to achieve superior computational peak performance.
[10]
The
Atlas was a joint venture between
Ferranti and the Manchester University and was designed to operate at processing speeds approaching one microsecond per instruction, about one million instructions per second.
[11] The first Atlas was officially commissioned on 7 December 1962 as one of the world's first supercomputers – considered to be the most powerful computer in the world at that time by a considerable margin, and equivalent to four
IBM 7094s.
[12]
The
CDC 6600, released in 1964, was designed by Cray to be the fastest in the world. Cray switched from use of germanium to silicon transistors, which could ran very fast, solving the overheating problem by introducing refrigeration.
[13] Given that the 6600 outperformed all the other contemporary computers by about 10 times, it was dubbed a
supercomputer and defined the supercomputing market when one hundred computers were sold at $8 million each.
[14][15][16][17]
Cray left CDC in 1972 to form his own company,
Cray Research.
[15] Four years after leaving CDC, Cray delivered the 80 MHz
Cray 1 in 1976, and it became one of the most successful supercomputers in history.
[18][19] The
Cray-2 released in 1985 was an 8 processor
liquid cooled computer and
Fluorinert was pumped through it as it operated. It performed at 1.9
gigaflops and was the world's fastest until 1990.
[20]
While the supercomputers of the 1980s used only a few processors, in the 1990s, machines with thousands of processors began to appear both in the United States and Japan, setting new computational performance records. Fujitsu's
Numerical Wind Tunnel supercomputer used 166 vector processors to gain the top spot in 1994 with a peak speed of 1.7
gigaFLOPS (GFLOPS) per processor.
[21][22] The
Hitachi SR2201 obtained a peak performance of 600 GFLOPS in 1996 by using 2048 processors connected via a fast three-dimensional
crossbar network.
[23][24][25] The
Intel Paragon could have 1000 to 4000
Intel i860 processors in various configurations, and was ranked the fastest in the world in 1993. The Paragon was a
MIMD machine which connected processors via a high speed two
dimensional mesh, allowing processes to execute on separate nodes, communicating via the
Message Passing Interface.
[26]
Hardware and architecture

A
Blue Gene/L cabinet showing the stacked
blades, each holding many processors
Approaches to
supercomputer architecture have taken dramatic turns since the earliest systems were introduced in the 1960s. Early supercomputer architectures pioneered by
Seymour Cray relied on compact innovative designs and local
parallelism to achieve superior computational peak performance.
[10] However, in time the demand for increased computational power ushered in the age of
massively parallel systems.
While the supercomputers of the 1970s used only a few
processors, in the 1990s, machines with thousands of processors began to appear and by the end of the 20th century, massively parallel supercomputers with tens of thousands of "off-the-shelf" processors were the norm. Supercomputers of the 21st century can use over 100,000 processors (some being
graphic units) connected by fast connections.
[3][4] The Connection Machine CM-5 supercomputer is a massively parallel processing computer capable of many billions of arithmetic operations per second.
[27]
Throughout the decades, the management of
heat density has remained a key issue for most centralized supercomputers.
[28][29][30] The large amount of heat generated by a system may also have other effects, e.g. reducing the lifetime of other system components.
[31] There have been diverse approaches to heat management, from pumping
Fluorinert through the system, to a hybrid liquid-air cooling system or air cooling with normal
air conditioning temperatures.
[20][32]
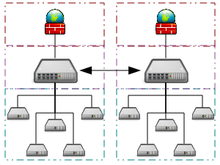
Systems with a massive number of processors generally take one of two paths. In the
grid computing approach, the processing power of a large number of computers, organised as distributed, diverse administrative domains, is opportunistically used whenever a computer is available.
[6] In another approach, a large number of processors are used in close proximity to each other, e.g. in a
computer cluster. In such a centralized
massively parallel system the speed and flexibility of the interconnect becomes very important and modern supercomputers have used various approaches ranging from enhanced
Infiniband systems to three-dimensional
torus interconnects.
[33][34] The use of
multi-core processors combined with centralization is an emerging direction, e.g. as in the
Cyclops64 system.
[8][9]
As the price, performance and energy efficiency of
general purpose graphic processors (GPGPUs) have improved,
[35] a number of
petaflop supercomputers such as
Tianhe-I and
Nebulae have started to rely on them.
[36] However, other systems such as the
K computer continue to use conventional processors such as
SPARC-based designs and the overall applicability of
GPGPUs in general-purpose high-performance computing applications has been the subject of debate, in that while a GPGPU may be tuned to score well on specific benchmarks, its overall applicability to everyday algorithms may be limited unless significant effort is spent to tune the application towards it.
[37][38] However, GPUs are gaining ground and in 2012 the
Jaguar supercomputer was transformed into
Titan by retrofitting CPUs with GPUs.
[39][40][41]
High performance computers have an expected life cycle of about three years.
[42]
A number of "special-purpose" systems have been designed, dedicated to a single problem. This allows the use of specially programmed
FPGA chips or even custom
VLSI chips, allowing better price/performance ratios by sacrificing generality. Examples of special-purpose supercomputers include
Belle,
[43] Deep Blue,
[44] and
Hydra,
[45] for playing
chess,
Gravity Pipe for astrophysics,
[46] MDGRAPE-3 for protein structure computation molecular dynamics
[47] and
Deep Crack,
[48] for breaking the
DES cipher.
Energy usage and heat management
A typical supercomputer consumes large amounts of electrical power, almost all of which is converted into heat, requiring cooling. For example,
Tianhe-1A consumes 4.04
megawatts of electricity.
[49] The cost to power and cool the system can be significant, e.g. 4 MW at $0.10/kWh is $400 an hour or about $3.5 million per year.
Heat management is a major issue in complex electronic devices, and affects powerful computer systems in various ways.
[50] The
thermal design power and
CPU power dissipation issues in supercomputing surpass those of traditional
computer cooling technologies. The supercomputing awards for
green computing reflect this issue.
[51][52][53]
The packing of thousands of processors together inevitably generates significant amounts of
heat density that need to be dealt with. The
Cray 2 was
liquid cooled, and used a
Fluorinert "cooling waterfall" which was forced through the modules under pressure.
[20] However, the submerged liquid cooling approach was not practical for the multi-cabinet systems based on off-the-shelf processors, and in
System X a special cooling system that combined air conditioning with liquid cooling was developed in conjunction with the
Liebert company.
[32]
In the
Blue Gene system, IBM deliberately used low power processors to deal with heat density.
[54] On the other hand, the IBM
Power 775, released in 2011, has closely packed elements that require water cooling.
[55] The IBM
Aquasar system, on the other hand uses
hot water cooling to achieve energy efficiency, the water being used to heat buildings as well.
[56][57]
The energy efficiency of computer systems is generally measured in terms of "FLOPS per
watt". In 2008,
IBM's Roadrunner operated at 3.76
MFLOPS/W.
[58][59] In November 2010, the
Blue Gene/Q reached 1,684 MFLOPS/W.
[60][61] In June 2011 the top 2 spots on the
Green 500 list were occupied by
Blue Gene machines in New York (one achieving 2097 MFLOPS/W) with the
DEGIMA cluster in Nagasaki placing third with 1375 MFLOPS/W.
[62]
Because copper wires can transfer energy into a supercomputer with much higher power densities than forced air or circulating refrigerants can remove waste heat,
[63] the ability of the cooling systems to remove waste heat is a limiting factor.
[64][65] As of 2015
[update], many existing supercomputers have more infrastructure capacity than the actual peak demand of the machine – designers generally conservatively design the power and cooling infrastructure to handle more than the theoretical peak electrical power consumed by the supercomputer. Designs for future supercomputers are power-limited – the
thermal design power of the supercomputer as a whole, the amount that the power and cooling infrastructure can handle, is somewhat more than the expected normal power consumption, but less than the theoretical peak power consumption of the electronic hardware.
[66]
Software and system management
Operating systems
Since the end of the 20th century,
supercomputer operating systems have undergone major transformations, based on the changes in
supercomputer architecture.
[67] While early operating systems were custom tailored to each supercomputer to gain speed, the trend has been to move away from in-house operating systems to the adaptation of generic software such as
Linux.
[68]
Since modern
massively parallel supercomputers typically separate computations from other services by using multiple types of
nodes, they usually run different operating systems on different nodes, e.g. using a small and efficient
lightweight kernel such as
CNK or
CNL on compute nodes, but a larger system such as a
Linux-derivative on server and
I/O nodes.
[69][70][71]
While in a traditional multi-user computer system
job scheduling is, in effect, a
tasking problem for processing and peripheral resources, in a massively parallel system, the job management system needs to manage the allocation of both computational and communication resources, as well as gracefully deal with inevitable hardware failures when tens of thousands of processors are present.
[72]
Although most modern supercomputers use the
Linux operating system, each manufacturer has its own specific Linux-derivative, and no industry standard exists, partly due to the fact that the differences in hardware architectures require changes to optimize the operating system to each hardware design.
[67][73]
Software tools and message passing

Wide-angle view of the
ALMA correlator.
[74]
The parallel architectures of supercomputers often dictate the use of special programming techniques to exploit their speed. Software tools for distributed processing include standard
APIs such as
MPI and
PVM,
VTL, and
open source-based software solutions such as
Beowulf.
In the most common scenario, environments such as
PVM and
MPI for loosely connected clusters and
OpenMP for tightly coordinated shared memory machines are used. Significant effort is required to optimize an algorithm for the interconnect characteristics of the machine it will be run on; the aim is to prevent any of the CPUs from wasting time waiting on data from other nodes.
GPGPUs have hundreds of processor cores and are programmed using programming models such as
CUDA.
Moreover, it is quite difficult to debug and test parallel programs.
Special techniques need to be used for testing and debugging such applications.
Distributed supercomputing
Opportunistic approaches
Example architecture of a
grid computing system connecting many personal computers over the internet
Opportunistic Supercomputing is a form of networked
grid computing whereby a "super virtual computer" of many
loosely coupled volunteer computing machines performs very large computing tasks. Grid computing has been applied to a number of large-scale
embarrassingly parallel problems that require supercomputing performance scales. However, basic grid and
cloud computing approaches that rely on
volunteer computing can not handle traditional supercomputing tasks such as fluid dynamic simulations.
The fastest grid computing system is the
distributed computing project Folding@home. F@h reported 43.1 PFLOPS of x86 processing power as of June 2014
[update]. Of this, 42.5 PFLOPS are contributed by clients running on various GPUs, and the rest from various CPU systems.
[75]
The
BOINC platform hosts a number of distributed computing projects. As of May 2011
[update], BOINC recorded a processing power of over 5.5 PFLOPS through over 480,000 active computers on the network
[76] The most active project (measured by computational power),
MilkyWay@home, reports processing power of over 700
teraFLOPS (TFLOPS) through over 33,000 active computers.
[77]
As of May 2011
[update],
GIMPS's distributed
Mersenne Prime search currently achieves about 60 TFLOPS through over 25,000 registered computers.
[78] The
Internet PrimeNet Server supports GIMPS's grid computing approach, one of the earliest and most successful grid computing projects, since 1997.
Quasi-opportunistic approaches
Quasi-opportunistic supercomputing is a form of
distributed computing whereby the “super virtual computer” of a large number of networked geographically disperse computers performs computing tasks that demand huge processing power.
[79] Quasi-opportunistic supercomputing aims to provide a higher quality of service than
opportunistic grid computing by achieving more control over the assignment of tasks to distributed resources and the use of intelligence about the availability and reliability of individual systems within the supercomputing network. However, quasi-opportunistic distributed execution of demanding parallel computing software in grids should be achieved through implementation of grid-wise allocation agreements, co-allocation subsystems, communication topology-aware allocation mechanisms, fault tolerant message passing libraries and data pre-conditioning.
[79]
Performance measurement
Capability vs capacity
Supercomputers generally aim for the maximum in
capability computing rather than
capacity computing. Capability computing is typically thought of as using the maximum computing power to solve a single large problem in the shortest amount of time. Often a capability system is able to solve a problem of a size or complexity that no other computer can, e.g. a very complex
weather simulation application.
[80]
Capacity computing, in contrast, is typically thought of as using efficient cost-effective computing power to solve a small number of somewhat large problems or a large number of small problems.
[80] Architectures that lend themselves to supporting many users for routine everyday tasks may have a lot of capacity, but are not typically considered supercomputers, given that they do not solve a single very complex problem.
[80]
Performance metrics

Top supercomputer speeds:
logscale speed over 60 years
In general, the speed of supercomputers is measured and
benchmarked in "
FLOPS" (
FLoating point Operations Per Second), and not in terms of "
MIPS" (Million Instructions Per Second), as is the case with general-purpose computers.
[81] These measurements are commonly used with an
SI prefix such as
tera-, combined into the shorthand "TFLOPS" (10
12 FLOPS, pronounced
teraflops), or
peta-, combined into the shorthand "PFLOPS" (10
15 FLOPS, pronounced
petaflops.) "
Petascale" supercomputers can process one quadrillion (10
15) (1000 trillion) FLOPS.
Exascale is computing performance in the exaFLOPS (EFLOPS) range. An EFLOPS is one quintillion (10
18) FLOPS (one million TFLOPS).
No single number can reflect the overall performance of a computer system, yet the goal of the Linpack benchmark is to approximate how fast the computer solves numerical problems and it is widely used in the industry.
[82] The FLOPS measurement is either quoted based on the theoretical floating point performance of a processor (derived from manufacturer's processor specifications and shown as "Rpeak" in the TOP500 lists) which is generally unachievable when running real workloads, or the achievable throughput, derived from the
LINPACK benchmarks and shown as "Rmax" in the TOP500 list. The LINPACK benchmark typically performs
LU decomposition of a large matrix. The LINPACK performance gives some indication of performance for some real-world problems, but does not necessarily match the processing requirements of many other supercomputer workloads, which for example may require more memory bandwidth, or may require better integer computing performance, or may need a high performance I/O system to achieve high levels of performance.
[82]
The TOP500 list

Distribution of top 500 supercomputers among different countries as of June 2014
Since 1993, the fastest supercomputers have been ranked on the TOP500 list according to their
LINPACK benchmark results. The list does not claim to be unbiased or definitive, but it is a widely cited current definition of the "fastest" supercomputer available at any given time.
This is a recent list of the computers which appeared at the top of the TOP500 list,
[83] and the "Peak speed" is given as the "Rmax" rating. For more historical data see
History of supercomputing.

Top 20 Supercomputers in the World as of June 2013
Largest Supercomputer Vendors according to the total Rmax (GFLOPS) operated
Source :
TOP500
 IBM IBM |
153 |
30.6 |
87,143,814 |
122,311,749 |
7,346,514 |
| Cray Inc. |
62 |
12.4 |
68,198,477 |
97,027,365 |
3,583,180 |
| HP |
179 |
35.8 |
44,855,405 |
73,630,508 |
3,747,812 |
 NUDT NUDT |
5 |
1 |
39,483,490 |
64,356,373 |
3,547,648 |
| SGI |
23 |
4.6 |
14,741,773 |
17,963,102 |
813,376 |
 Fujitsu Fujitsu |
8 |
1.6 |
13,719,473 |
14,981,840 |
915,974 |
 Bull Bull |
18 |
3.6 |
10,094,490 |
12,564,851 |
588,120 |
| Dell |
9 |
1.8 |
8,003,573 |
12,687,479 |
618,396 |
| Atipa |
3 |
0.6 |
3,044,976 |
4,163,712 |
214,584 |
| NEC/HP |
1 |
0.2 |
2,785,000 |
5,735,685 |
76,032 |
 T-Platforms T-Platforms |
2 |
0.4 |
2,750,900 |
4,276,082 |
115,780 |
| RSC Group |
4 |
0.8 |
1,492,512 |
2,399,433 |
99,200 |
| Dawning |
2 |
0.4 |
1,451,600 |
3,217,772 |
151,360 |
| Hitachi/Fujitsu |
1 |
0.2 |
1,018,000 |
1,502,236 |
222,072 |
| Supermicro |
1 |
0.2 |
798,261 |
3,164,480 |
160,600 |
| NRCPCET |
1 |
0.2 |
795,900 |
1,070,160 |
137,200 |
 ClusterVision ClusterVision |
2 |
0.4 |
784,735 |
881,254 |
42,368 |
| Intel |
1 |
0.2 |
758,873 |
933,481 |
51,392 |
| Amazon |
2 |
0.4 |
724,269 |
947,610 |
43,520 |
| Oracle |
2 |
0.4 |
708,300 |
804,835 |
68,672 |
 MEGWARE MEGWARE |
3 |
0.6 |
610,521 |
710,592 |
54,800 |
| NEC |
3 |
0.6 |
578,987 |
709,520 |
21,296 |
| Adtech |
1 |
0.2 |
532,600 |
1,098,000 |
38,400 |
| Hitachi |
2 |
0.4 |
496,900 |
622,598 |
20,544 |
 IPE, Nvidia, Tyan IPE, Nvidia, Tyan |
1 |
0.2 |
496,500 |
1,012,650 |
29,440 |
 Itautec Itautec |
2 |
0.4 |
411,800 |
920,830 |
27,776 |
 Netweb Technologies Netweb Technologies |
1 |
0.2 |
388,442 |
520,358 |
30,056 |
 Xenon Systems Xenon Systems |
1 |
0.2 |
335,300 |
472,498 |
6,875 |
| AMD, ASUS, FIAS, GSI |
1 |
0.2 |
316,700 |
593,600 |
10,976 |
| Clustervision/Supermicro |
1 |
0.2 |
299,300 |
588,749 |
44,928 |
 Niagara Computers, Supermicro Niagara Computers, Supermicro |
1 |
0.2 |
289,500 |
348,660 |
5,310 |
| Inspur |
1 |
0.2 |
196,234 |
262,560 |
8,412 |
| HP/WIPRO |
1 |
0.2 |
188,700 |
394,760 |
12,532 |
| PEZY Computing/Exascaler Inc. |
1 |
0.2 |
178,107 |
395,264 |
262,784 |
| Acer Group |
1 |
0.2 |
177,100 |
231,859 |
26,244 |
Applications
The stages of supercomputer application may be summarized in the following table:
The IBM
Blue Gene/P computer has been used to simulate a number of artificial neurons equivalent to approximately one percent of a human cerebral cortex, containing 1.6 billion neurons with approximately 9 trillion connections. The same research group also succeeded in using a supercomputer to simulate a number of artificial neurons equivalent to the entirety of a rat's brain.
[90]
Modern-day weather forecasting also relies on supercomputers. The
National Oceanic and Atmospheric Administration uses supercomputers to crunch hundreds of millions of observations to help make weather forecasts more accurate.
[91]
In 2011, the challenges and difficulties in pushing the envelope in supercomputing were underscored by
IBM's abandonment of the
Blue Waters petascale project.
[92]
Research and development trends
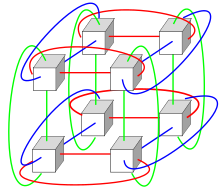
Diagram of a 3-dimensional
torus interconnect used by systems such as Blue Gene, Cray XT3, etc.
Given the current speed of progress, industry experts estimate that supercomputers will reach 1
EFLOPS (10
18, 1,000 PFLOPS or one quintillion FLOPS) by 2018. The Chinese government in particular is pushing to achieve this goal after they briefly achieved the most powerful supercomputer in the world with Tianhe-1A in 2010 (ranked fifth by 2012).
[93] Using the
Intel MIC multi-core processor architecture, which is Intel's response to GPU systems, SGI also plans to achieve a 500-fold increase in performance by 2018 in order to achieve one EFLOPS. Samples of MIC chips with 32 cores, which combine vector processing units with standard CPU, have become available.
[94] The Indian government has also stated ambitions for an EFLOPS-range supercomputer, which they hope to complete by 2017.
[95] In November 2014, it was reported that India is working on the fastest supercomputer ever, which is set to work at 132 EFLOPS.
[96]
Erik P. DeBenedictis of
Sandia National Laboratories theorizes that a zettaFLOPS (10
21, one sextillion FLOPS) computer is required to accomplish full
weather modeling, which could cover a two-week time span accurately.
[97][not in citation given] Such systems might be built around 2030.
[98]
Energy use
High performance supercomputers usually require high energy, as well. However, Iceland may be a benchmark for the future with the world's first zero-emission supercomputer. Located at the Thor Data Center in Reykjavik, Iceland, this supercomputer relies on completely renewable sources for its power rather than fossil fuels. The colder climate is an added bonus for help with cooling, too, making it one of the greenest facilities in the world.
[99]


















