What’s your favorite science fiction use of nanotechnology? Are you a fan of the Terminator, or the Borg from Star Trek, that imitate humans or assimilate them? Or are you fascinated by the replicators in Stargate:SG1,
which can self-assemble, self-replicate and take the form of anything
from space ships and buildings, to machinery, to humanoid bodies?
Whatever you find most interesting, the constant is that
nanotechnology is one of our favorite sci-fi technologies. What’s even
cooler is that, like many technologies, nanotech is quickly becoming
more “science” and less “fiction.” While we’re not at the point of
humanoid replicators or self-assembling vehicles just yet, there are a
lot of potential application for nanotechnology to improve some of the
most ambitious human endeavours—such as space exploration.
Technology at the Nanoscale
What is nanotech exactly? Short answer, it’s technology that operates at the nanoscale. One nanometer (nm) is measured at one billionth (10-9)
of a meter, and the convention is to assign the term “nanotechnology”
to technology that operates on the scale of 1 to 100 nm. The 1 nm
bottom limit is due to the size of atoms, which nanotech needs to
manipulate, while the upper limit is largely arbitrary as the size where
nanoscale phenomena become apparent and useable by a nano device.
Nanotechnology features two primary approaches, which are “bottom up”
where materials or devices are self-assembled from molecular
components, and “top down” where nanoscale objects are constructed by
micro-scale and macro-scale devices. Both methods show potential for
the development of future nanomaterials and nanodevices capable of
exhibiting specific properties or being programmed to perform tasks and
operate autonomously.
With the potential inherent in nanotechnology, it’s easy to see why
nanoengineering and nanotechnology research are booming, and a
particular focus is on exploring space: how to get there, how to protect
space travellers, and where they will live when they arrive on distant
planets.
Nanotechnology for Space Exploration
Space exploration is a prime candidate to take advantage of
nanotechnology. It’s expensive and risky, and in many ways currently,
extremely inefficient. Picture the millions spent on space missions,
the satellites and astronauts lost, and the sheet investment of time
needed for even the simplest endeavor.
These expenses, risks and inefficiencies are what makes
nanotechnology so appealing, because the benefits and capabilities that
nanotech promises could solve a lot of these problems.
Propulsion
Propulsion is one of the most significant challenges to developing
fast and convenient space travel. Make no mistake, we’ve gotten pretty
good at building rockets that go really fast—even fast enough to get
into orbit around the planet—but that’s when things slow right down.
While launch rockets are great at what they were designed to do (lift a
giant tube away from the planet), they aren’t meant for the slower speed
and fuel longevity required for extended travel. Once a spacecraft
wants to leave orbit and journey somewhere else, a different kind of
propulsion engine is required.
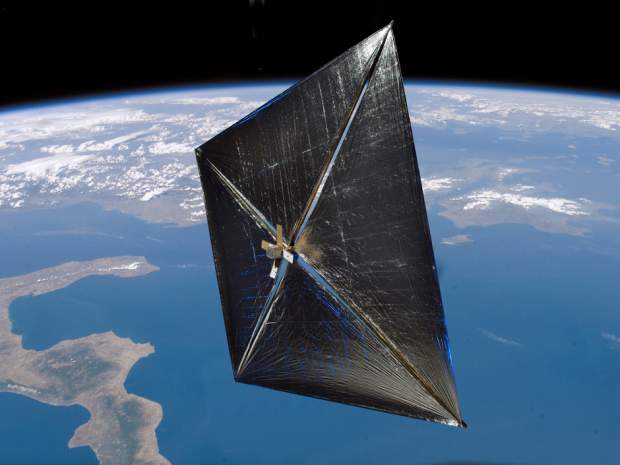
Solar sails could be the solution, and are one of the technologies
that sees a lot of potential in nanotechnology. As a propulsion device,
solar sails use the pressure of solar radiation against a highly
reflective expanse of material to create thrust, and therefore don't
need additional propellant fuel. However, solar sails do need to have a
very large surface area that is extremely reflective, but also extremely
thin and lightweight.
The
Solar Sail Demonstration mission led by NASA and L’Garde Inc. aimed to
prove the viability of using ultra thin sails and sunlight for
propulsion. (Image courtesy of NASA.)
Materials engineered using nanotechnology can satisfy these
requirements. Effective solar sails have to be hundreds of meters—or
even kilometers—wide in order to have enough surface area to create the
necessary propulsion to travel inter-planetary or interstellar
distances. Carbon nanotube-based materials in particular are a
nanotechnological solution, able to be made into strong, lightweight and
extremely thin sheets that could replace the polymer and aluminum solar
sail materials currently used for sail prototypes. Advanced
nanomaterials could also be designed to have specific properties, such
as being highly reflective.
There’s also the goal of developing future nanotechnology and
nanomaterials that will have self-repairing properties. In the context
of solar sails, this could be invaluable; for example, if the
nanomaterial could recognize and repair damage sustained during
deployment and travel, such as tears during the unfolding process, or
“healing” from micrometeorite impacts. This could drastically improve
the success and longevity of these missions, enabling solar
sail-propelled spacecraft to travel faster and farther.
Planetary Exploration with Nanobots and Nanosensors
Exploring the surface of a distant planet using swarms of tiny nanorobots is another popular application of nanotech in space.
Currently, the Mars rovers—Spirit, Opportunity and Curiosity—have
been the greatest success stories when it comes to planetary
exploration. But as scientifically rich as these missions have been,
each rover can only examine one small area at a time, and their movement
speeds are quite slow. It’s understandable, given the time lags
involved in communicating between Earth and Mars, and the complexity of
the instructions and data that must be relayed back and forth.
Understandable, but extremely slow.
Low-angle
self-portrait of NASA’s Curiosity Mars rover. Taken August 5th, 2015,
the image is a composite showing the vehicle and the site where it
performed drilling operations, dubbed “Buckskin” on lower Mount Sharpe.
Future planetary exploration using nanobots would replace these types
of rovers, and provide faster and more detailed mapping, chemical
analysis, atmospheric composition and other vital data. (Image courtesy
of NASA.)
This is where a nanorobot swarm could be beneficial. Imagine if a
single landed rover could deploy a mass of tiny nanobots capable of
travelling across the planet’s surface, or drifting on wind and through
the atmosphere, to survey large swaths of a planet quickly and in great
detail—even down to the molecular level.
With the development of nanobots that operate using some form of
artificial intelligence (AI) that enables them to communicate and
self-organize, then the possibilities are almost limitless. A planetary
surface survey mission could see nanobots rolling or crawling across
the landscape, collecting sensor data on the minerals and compounds in
the air and ground, testing for toxicity or measuring radiation, and
then assembling into a communication antenna to transmit the data back
to a hub station or satellite for further analysis and relay back to
Earth.
A team from Northeastern University engaged in investigating possible concepts for nanotech in space exploration also proposed the idea
of a sensor net “spider web” comprised of hairline tubes that could be
deployed to spread across large areas of a planet’s surface. The tubes
would contain a multitude of nanosensors to measure surface temperature,
chemical composition and other elements of the planetary environment.
Nanobot swarms could also be effective in exploring the thick
atmosphere of planets like Venus, or the stormy gaseous planets such as
Jupiter and Saturn, by releasing nanobots or nanosensors into the
atmosphere and having them transmit their data back to orbiting
satellites, gathering detailed information on wind currents, storm
patterns, and chemical composition of these planets.
For these applications of nanorobotics, many researchers are looking to nano electromechanical systems
(NEMS) in the place of conventional motor designs. This is because
NEMS can be made of nanomaterials, such as carbon nanotubes, these roots
can be made extremely tiny, and extremely flexible.
NEMS are a specific class of device that integrates electrical and
mechanical functionality at the nanoscale, and combine transistor-like
nanoelectronics with mechanical components such as motors, pumps and
actuators. They are often used as physical, biological or chemical
sensors for a variety of applications, such as accelerometer and air
chemical sensors.
Nanomaterials for Enhanced Spacesuits
But travelling to other planets, and exploring them with nanobots, is
only half the journey – eventually, humans will want to travel to these
planets, and explore the surface for themselves.
Spacesuits enhanced with nanotechnology will be an essential aspect
of getting humans safely to other planets, and enabling them to spend
time exploring—since, as of yet, there are no planetary surfaces
discovered (other than Earth, of course) which have breathable
atmosphere, and radiation during space travel and on an extraterrestrial
planet’s surface is a constant concern.
Spacesuits made from nanomaterials will be lighter and more flexible, allowing astronauts to explore and maneuver easily.
The potential for self-repairing nanomaterials is once again a key
element, as one of the most significant threats facing astronauts is the
possibility of puncturing their suit and creating a breach that lets
oxygen escape, or lets a toxic atmosphere inside.
At it’s most basic—relatively speaking, since this is still advanced
futuristic tech—a spacesuit could have a gel or metallic nanomaterial
layer between the interior and exterior surfaces of a spacesuit. This
layer would respond to a puncture or tear by reorganizing or reassembling in order to close or repair the damage.
Those interior and exterior layers are also likely to be fabricated out
of advanced metamaterials that have been nanoengineered for exceptional
strength and durability, while remaining thin and lightweight—which
would make the space suits resistant to damage right from the start.
With thinner materials, those spacesuits would also be much more
flexible, making it easier for astronauts to move through the spaceship
or planetary environment to explore and perform scientific tasks.
Along with repairing damage to the suits, there are nanotech
applications that would monitor and repair the astronaut inside. Of
course, the word “repair” is used a little loosely; what’s referred to
would be the medical monitoring and treatment capabilities that nanotech
could make available.
Space travel and space exploration are extremely dangerous to humans,
no two ways about it, and even the most advanced protective efforts
could still fail or be damaged. This means it’s also vital to be able
to monitor astronauts’ health and vitals, as well as be able to
administer a variety of treatments effectively and on demand.
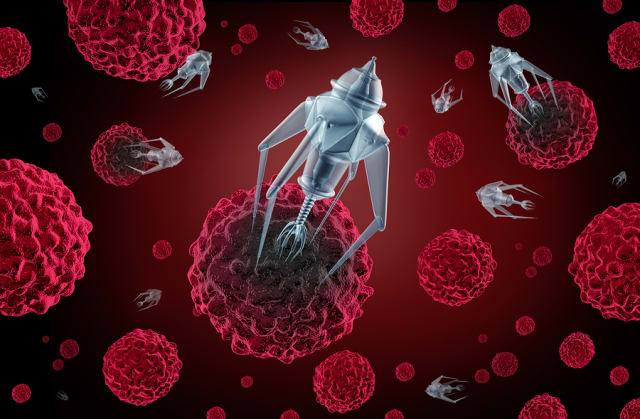
Artist’s conception of nanorobots that can enter the human body and treat disease or deliver medication at the cellular level.
There is already research into nanotech-based solutions for things
like administering drugs and using nanosensors to monitor patient
health—and those will become essential to keeping astronauts healthy.
For starters, the aforementioned space suits can have an inner layer
that uses nanosensors to monitor various aspects of the astronaut’s
vitals, such as temperature, heartbeat, respiration and oxygen levels
all the way down to the level of blood glucose and other important
factors.
These sensors would be able to relay the data to the astronaut via a
heads-up display (HUD) in their space suit, or back to the main base or
ship system, ensuring real-time response to any health issues.
Nanosensors could also communicate with nano-implants or other medical
devices within the astronaut’s body to deliver drugs, vitamins or
emergency medicine as needed, ensuring the astronaut will be in peak
condition while performing their tasks.
In an extreme case, such as sustaining an injury through or beneath the suit (like Watney in The Martian),
many researchers envision something like a nanogel that will recognize
there is an injury and have the ability to self-organize to seal the
wound, supply antibiotics, and otherwise provide enough treatment that
the astronaut will have time to return to the ship or base to receive
proper medical care.
Nanotechnology-Built Habitats
Once the travel, exploration and personal gear are covered, what’s
left is where these astronauts will stay once they arrive on a new
planet.
Colonization of other planets is a long-standing human dream, and our
technological capabilities are finally approaching the sophistication
necessary to accomplish this goal—just look at NASA’s Mars 2020 plan.
Habitat construction for planetary colonization will greatly benefit
from the use of nanotech in several ways, the most significant of which
will be with building structure for humans to work and live.
3D printing is a popular proposal for creating habitat spaces
and is a large-scale example of what sufficiently advanced nanotech
could do at the much smaller scale. Current technologies envision
essentially an oversized 3D printer that can “print” a building out of
cement-like mixtures mined and processed from surface materials.
Houses
designed by Zopherus as part of NASA’s Habitat Centennial Challenge,
which would be 3D printed and deposited by the roving lander, pictured
at right. (Image courtesy of NASA.)
It’s a good idea, and would certainly do the job; however, a nanotech
solution would be much more efficient—such as swarms of tiny nanobots
doing the mining and mineral collection, then processing the minerals
into a building material compound, then collaborating to deposit the
building material according to a programmed habitat design.
Ideally, these nanobots would be programmed ahead of time with
instructions for those tasks and the design of the habitat, then they
would act collectively and autonomously to complete the project. This
could be much more efficient than a single large printer extruding
material to build, and would enable a far greater ability to
custom-design habitat buildings for the needs of the astronauts and the
environmental factors unique to a given planetary surface. Transporting
the necessary equipment would also be easier, since all a
habitat-building mission would need is a lander full of nanobots, rather
than trying to launch and land heavy equipment.
However, it’s still possible that the giant 3D printer will be the
way to go—at least in the beginning—but that doesn’t mean nanotech won’t
still be useful. Particularly nanomaterials, as the building material
being derived from the planet’s surface could still be augmented by
nanotech to be stronger, lighter, and more resistant to radiation or
toxicity.
Another method of building habitable spaces on a planet is to create
tunnels beneath the surface, which would provide some degree of natural
protection from radiation or a toxic atmosphere. Nanotech would be
useful in this scenario, as well, with nanobots able to dig the tunnels,
and turn these minerals into a strong nanomaterial to then line the
tunnel walls and build other structures beneath the surface.
Aside from buildings, extra-terrestrial colonies will also need
reliable communication, both with other colonization groups on the
planet’s surface and with orbiting communications satellites or space
ships. Just as self-assembling, AI-enabled nanobots would organize
themselves into communications equipment and antennas during the
planetary exploration phase, they would be able to continue this
function for an established colony.
Potential Dangers
Overall, nanotech and nanorobotics look extremely promising for
applications in space exploration and colonization—but a rosy outlook by
no means guarantees a problem-free outcome.
Popularized by K. Eric Drexler in his 1986 book Engines of Creation,
the “grey goo” scenario—an idea that nano-scale assemblers capable of
fabricating any object, as well as self-replicating, could run amok and
consume everything in their path—is often what first comes to mind when
people consider the ways nanotechnology could go wrong. But this really
is largely science fiction.
The more realistic risks to nanotechnology are similar to the risk
factors inherent in any new technology or chemical compound. For
example, while the idea of nanobots used to heal wounds is appealing,
there is still no way of knowing just what the effect would be on the
human physiology. Currently there is a trend toward using nanoparticles
in consumer products—for example, cosmetics and skin care products—we
are also seeing evidence that these nanoparticles can cause skin and
organ damage with repeated exposure. Nanotechnology for healthcare and
medical treatment is still in it’s infancy, and as yet there’s no way to
know whether there will be long term effects from introducing foreign
nanoparticles or nanorobotics into the human body.
There is also the risk of environmental contamination, a particular
concern when exploring previously untouched extraterrestrial planetary
surfaces. Current missions to explore the moon, Mars or asteroids far
out in the solar system are meticulous about ensuring that no biological
contaminants are on the equipment, landers or rovers that will be
coming into contact with these distant environments.
However, many of the nanotechnology solutions to surveying these
environments involve releasing nanoscale sensors or robotics into the
air and onto the ground. There is a realistic expectation with these
swarms that not only would it be virtually impossible to reclaim every
last one of them, but the presence of these foreign objects could
contaminate or otherwise have an adverse effect on the environment.
Five Aristotelian senses and their respective sensory organs inherent among Homo sapiens
An allegory of five senses. Still Life by Pieter Claesz, 1623. The painting illustrates the senses through musical instruments, a compass, a book, food and drink, a mirror, incense and an open perfume bottle. The tortoise may be an illustration of touch or an allusion to the opposite (the tortoise isolating in its shell).
Humans have a multitude of sensors. Sight (vision), hearing (audition), taste (gustation), smell (olfaction), and touch (somatosensation)
are the five traditionally recognized senses. The ability to detect
other stimuli beyond those governed by these most broadly recognized
senses also exists, and these sensory modalities include temperature (thermoception), kinesthetic sense (proprioception), pain (nociception), balance (equilibrioception), vibration (mechanoreception), and various internal stimuli (e.g. the different chemoreceptors for detecting salt and carbon dioxide concentrations in the blood, or sense of hunger and sense of thirst).
However, what constitutes a sense is a matter of some debate, leading
to difficulties in defining what exactly a distinct sense is, and where
the borders between responses to related stimuli lie.
Other animals also have receptors to sense the world around them,
with degrees of capability varying greatly between species. Humans have
a comparatively weak sense of smell and a stronger sense of sight
relative to many other mammals while some animals may lack one or more of the traditional five senses. Some animals may also intake and interpret sensory stimuli
in very different ways. Some species of animals are able to sense the
world in a way that humans cannot, with some species able to sense electrical and magnetic fields, and detect water pressure and currents.
A broadly acceptable definition of a sense would be "A system that
consists of a group of sensory cell types that responds to a specific
physical phenomenon, and that corresponds to a particular group of
regions within the brain where the signals are received and
interpreted." There is no firm agreement as to the number of senses
because of differing definitions of what constitutes a sense.
The senses are frequently divided into exteroceptive and interoceptive:
Exteroceptive senses are senses that perceive the body's own position, motion, and state, known as proprioceptive senses. External senses include the traditional five: sight, hearing, touch, smell and taste, as well as thermoception (temperature differences) and possibly an additional weak magnetoception (direction). Proprioceptive senses include nociception (pain); equilibrioception (balance); proprioception (a sense of the position and movement of the parts of one's own body).
In Buddhist philosophy, Ayatana
or "sense-base" includes the mind as a sense organ, in addition to the
traditional five. This addition to the commonly acknowledged senses may
arise from the psychological orientation involved in Buddhist thought
and practice. The mind considered by itself is seen as the principal
gateway to a different spectrum of phenomena that differ from the
physical sense data. This way of viewing the human sense system
indicates the importance of internal sources of sensation and perception
that complements our experience of the external world.
Five "traditional" senses
Sight
In this painting by Pietro Paolini, each individual represents one of the five senses.
Sight or vision (adjectival form: visual/optical) is the capability of the eye(s) to focus and detect images of visible light on photoreceptors in the retina of each eye that generates electrical nerve impulses for varying colors, hues, and brightness. There are two types of photoreceptors: rods and cones.
Rods are very sensitive to light, but do not distinguish colors. Cones
distinguish colors, but are less sensitive to dim light. There is some
disagreement as to whether this constitutes one, two or three senses.
Neuroanatomists generally regard it as two senses, given that different
receptors are responsible for the perception of color and brightness.
Some argue that stereopsis,
the perception of depth using both eyes, also constitutes a sense, but
it is generally regarded as a cognitive (that is, post-sensory) function
of the visual cortex of the brain where patterns and objects in images are recognized and interpreted based on previously learned information. This is called visual memory.
The inability to see is called blindness.
Blindness may result from damage to the eyeball, especially to the
retina, damage to the optic nerve that connects each eye to the brain,
and/or from stroke (infarcts in the brain). Temporary or permanent blindness can be caused by poisons or medications.
People who are blind from degradation or damage to the visual
cortex, but still have functional eyes, are actually capable of some
level of vision and reaction to visual stimuli but not a conscious
perception; this is known as blindsight.
People with blindsight are usually not aware that they are reacting to
visual sources, and instead just unconsciously adapt their behaviour to
the stimulus.
On February 14, 2013 researchers developed a neural implant that gives rats the ability to sense infrared light which for the first time provides living creatures with new abilities, instead of simply replacing or augmenting existing abilities.
Hearing
Hearing or audition (adjectival form: auditory) is the sense of sound
perception. Hearing is all about vibration. Mechanoreceptors turn
motion into electrical nerve pulses, which are located in the inner ear.
Since sound is vibration, propagating through a medium such as air, the
detection of these vibrations, that is the sense of the hearing, is a
mechanical sense because these vibrations are mechanically conducted
from the eardrum through a series of tiny bones to hair-like fibers in
the inner ear, which detect mechanical motion of the fibers within a range of about 20 to 20,000 hertz,
with substantial variation between individuals. Hearing at high
frequencies declines with an increase in age. Inability to hear is
called deafness or hearing impairment. Sound can also be detected as vibrations conducted through the body
by tactition. Lower frequencies that can be heard are detected this
way. Some deaf people are able to determine direction and location of
vibrations picked up through the feet.
Taste
Taste or gustation
(adjectival form: gustatory) is one of the traditional five senses. It
refers to the capability to detect the taste of substances such as food,
certain minerals, and poisons, etc. The sense of taste is often
confused with the "sense" of flavor, which is a combination of taste and
smell perception.
Philippe Mercier - The Sense of Taste - Google Art Project
Flavor depends on odor, texture, and temperature as well as on taste.
Humans receive tastes through sensory organs called taste buds, or
gustatory calyculi, concentrated on the upper surface of the tongue.
There are five basic tastes: sweet, bitter, sour, salty and umami. Other tastes such as calcium and free fatty acids may also be basic tastes but have yet to receive widespread acceptance. The inability to taste is called ageusia.
Smell
Smell or olfaction
(adjectival form: olfactory) is the other "chemical" sense. Unlike
taste, there are hundreds of olfactory receptors (388 according to one
source),
each binding to a particular molecular feature. Odor molecules possess a
variety of features and, thus, excite specific receptors more or less
strongly. This combination of excitatory signals from different
receptors makes up what we perceive as the molecule's smell.
In the brain, olfaction is processed by the olfactory system. Olfactory receptor neurons in the nose differ from most other neurons in that they die and regenerate on a regular basis. The inability to smell is called anosmia. Some neurons in the nose are specialized to detect pheromones.
Touch
Touch or somatosensation (adjectival form: somatic), also called tactition (adjectival form: tactile) or mechanoreception, is a perception resulting from activation of neural receptors, generally in the skin including hair follicles, but also in the tongue, throat, and mucosa. A variety of pressure receptors respond to variations in pressure (firm, brushing, sustained, etc.). The touch sense of itching caused by insect bites or allergies involves special itch-specific neurons in the skin and spinal cord. The loss or impairment of the ability to feel anything touched is called tactile anesthesia. Paresthesia is a sensation of tingling, pricking, or numbness of the skin that may result from nerve damage and may be permanent or temporary.
Other senses
Balance and acceleration
Balance, equilibrioception, or vestibular sense
is the sense that allows an organism to sense body movement, direction,
and acceleration, and to attain and maintain postural equilibrium and
balance. The organ of equilibrioception is the vestibular labyrinthine
system found in both of the inner ears. In technical terms, this organ is responsible for two senses of angular momentum acceleration and linear acceleration (which also senses gravity), but they are known together as equilibrioception.
The vestibular nerve conducts information from sensory receptors in three ampulla that sense motion of fluid in three semicircular canals caused by three-dimensional rotation of the head. The vestibular nerve also conducts information from the utricle and the saccule, which contain hair-like sensory receptors that bend under the weight of otoliths (which are small crystals of calcium carbonate) that provide the inertia needed to detect head rotation, linear acceleration, and the direction of gravitational force.
Temperature
Thermoception is the sense of heat and the absence of heat (cold) by the skin and internal skin passages, or, rather, the heat flux (the rate of heat flow)
in these areas. There are specialized receptors for cold (declining
temperature) and for heat (increasing temperature). The cold receptors
play an important part in the animal's sense of smell, telling wind
direction. The heat receptors are sensitive to infrared radiation and
can occur in specialized organs, for instance in pit vipers. The thermoceptors in the skin are quite different from the homeostatic thermoceptors in the brain (hypothalamus), which provide feedback on internal body temperature.
Proprioception
Proprioception, the kinesthetic sense, provides the parietal cortex
of the brain with information on the movement and relative positions of
the parts of the body. Neurologists test this sense by telling patients
to close their eyes and touch their own nose with the tip of a finger.
Assuming proper proprioceptive function, at no time will the person lose
awareness of where the hand actually is, even though it is not being
detected by any of the other senses. Proprioception and touch are
related in subtle ways, and their impairment results in surprising and
deep deficits in perception and action.
Pain
Nociception (physiological pain)
signals nerve-damage or damage to tissue. The three types of pain
receptors are cutaneous (skin), somatic (joints and bones), and visceral
(body organs). It was previously believed that pain was simply the
overloading of pressure receptors, but research in the first half of the
20th century indicated that pain is a distinct phenomenon that
intertwines with all of the other senses, including touch. Pain was once
considered an entirely subjective experience, but recent studies show
that pain is registered in the anterior cingulate gyrus of the brain. The main function of pain is to attract our attention
to dangers and motivate us to avoid them. For example, humans avoid
touching a sharp needle, or hot object, or extending an arm beyond a
safe limit because it is dangerous, and thus hurts. Without pain, people
could do many dangerous things without being aware of the dangers.
Sexual stimulation
Sexual stimulation is any stimulus (including bodily contact) that leads to, enhances and maintains sexual arousal, and may lead to orgasm.
Distinct from the general sense of touch, sexual stimulation is
strongly tied to hormonal activity and chemical triggers in the body.
Although sexual arousal may arise without physical stimulation, achieving orgasm usually requires physical sexual stimulation (stimulation of the Krause-Finger corpuscles found in erogenous zones of the body).
Other internal senses
An internal sense also known as interoception is "any sense that is normally stimulated from within the body".
These involve numerous sensory receptors in internal organs, such as
stretch receptors that are neurologically linked to the brain.
Interoception is thought to be atypical in clinical conditions such as
alexithymia.
Some examples of specific receptors are:
Peripheral chemoreceptors in the brain monitor the carbon dioxide and oxygen levels in the brain to give a feeling of suffocation if carbon dioxide levels get too high.
Chemoreceptors in the circulatory system also measure salt levels
and prompt thirst if they get too high; they can also respond to high blood sugar levels in diabetics.
Cutaneous receptors
in the skin not only respond to touch, pressure, temperature and
vibration, but also respond to vasodilation in the skin such as blushing.
Stretch receptors in the gastrointestinal tract sense gas distension that may result in colic pain.
Sensory receptors in pharynx mucosa, similar to touch receptors in the skin, sense foreign objects such as food that may result in a gag reflex and corresponding gagging sensation.
Stimulation of sensory receptors in the urinary bladder and rectum may result in sensations of fullness.
Stimulation of stretch sensors that sense dilation of various blood
vessels may result in pain, for example headache caused by vasodilation
of brain arteries.
Cardioception refers to the perception of the activity of the heart.
The sense of agency refers to the subjective feeling of having chosen
a particular action. Some conditions, such as schizophrenia, can lead
to a loss of this sense, causing a person to feel like a machine or even
leading to delusions of being controlled from some outside source. The
opposite extreme occurs too, with some people experiencing everything in
their environment as if they had decided that it would happen.
Even in non-pathological cases, there is a measurable difference
between making a decision and the feeling of agency. Through methods
such as the Libet experiment,
a gap of half a second or more can be detected from the time when there
are detectable neurological signs of a decision having been made to the
time when the subject actually becomes conscious of the decision.
There are also experiments in which an illusion of agency is
induced in psychologically normal subjects. In Wegner and Wheatley 1999,
subjects were given instructions to move a mouse around a scene and
point to an image about once every thirty seconds. However, a second
person—acting as a test subject but actually a confederate—had their
hand on the mouse at the same time, and controlled some of the movement.
Experimenters were able to arrange for subjects to perceive certain
"forced stops" as if they were their own choice.
Familiarity
Recognition memory is sometimes divided into two functions by neuroscientists: familiarity and recollection. A strong sense of familiarity can occur without any recollection, for example in cases of deja vu. The temporal lobe, in particular the perirhinal cortex,
responds differently to stimuli which feel novel than to things which
feel familiar. Firing rates in the perirhinal cortex are connected with
the sense of familiarity in humans and other mammals. In tests,
stimulating this area at 10–15 Hz caused animals to treat even novel
images as familiar, and stimulation at 30–40 Hz caused novel images to
be partially treated as familiar.
Specifically, stimulation at 30–40 Hz led to animals looking at a
familiar image for longer periods, as they would for an unfamiliar one;
but it did not lead to the same exploration behavior normally associated
with novelty. Recent studies on lesions in the area concluded that rats
with a damaged perirhinal cortex were still more interested in
exploring when novel objects were present, but seemed unable to tell
novel objects from familiar ones—they examined both equally. Thus, other
brain regions are involved with noticing unfamiliarity, but the
perirhinal cortex is needed to associate the feeling with a specific
source.
Non-human senses
Analogous to human senses
Other
living organisms have receptors to sense the world around them,
including many of the senses listed above for humans. However, the
mechanisms and capabilities vary widely.
Smell
Most non-human mammals have a much keener sense of smell than humans, although the mechanism is similar. An example of smell in non-mammals is that of sharks,
which combine their keen sense of smell with timing to determine the
direction of a smell. They follow the nostril that first detected the
smell. Insects have olfactory receptors on their antennae.
Vomeronasal organ
Many animals (salamanders, reptiles, mammals) have a vomeronasal organ that is connected with the mouth cavity. In mammals it is mainly used to detect pheromones of marked territory, trails, and sexual state. Reptiles like snakes and monitor lizards
make extensive use of it as a smelling organ by transferring scent
molecules to the vomeronasal organ with the tips of the forked tongue.
In reptiles the vomeronasal organ is commonly referred to as Jacobsons
organ. In mammals, it is often associated with a special behavior called
flehmen characterized by uplifting of the lips. The organ is vestigial in humans, because associated neurons have not been found that give any sensory input in humans.
Taste
Flies and butterflies have taste organs on their feet, allowing them to taste anything they land on.
Catfish have taste organs across their entire bodies, and can taste anything they touch, including chemicals in the water.
Vision and light sensing
Cats have the ability to see in low light, which is due to muscles surrounding their irides–which contract and expand their pupils–as well as to the tapetum lucidum, a reflective membrane that optimizes the image.
Pit vipers, pythons and some boas have organs that allow them to detect infrared light, such that these snakes are able to sense the body heat of their prey. The common vampire bat may also have an infrared sensor on its nose. It has been found that birds and some other animals are tetrachromats and have the ability to see in the ultraviolet down to 300 nanometers. Bees and dragonflies are also able to see in the ultraviolet. Mantis shrimps can perceive both polarized light and multispectral
images and have twelve distinct kinds of color receptors, unlike humans
which have three kinds and most mammals which have two kinds.
Cephalopods have the ability to change color using chromatophores in their skin. Researchers believe that opsins
in the skin can sense different wavelengths of light and help the
creatures choose a coloration that camouflages them, in addition to
light input from the eyes. Other researchers hypothesize that cephalopod eyes in species which only have a single photoreceptor protein may use chromatic aberration to turn monochromatic vision into color vision, explaining pupils shaped like the letter U, the letter W, or a dumbbell, as well as explaining the need for colorful mating displays. Some cephalopods can distinguish the polarization of light.
Balance
Many invertebrates have a statocyst, which is a sensor for acceleration and orientation that works very differently from the mammalian's semi-circular canals.
Sensing gravity
Some
plants (such as mustard) have genes that are necessary for the plant to
sense the direction of gravity. If these genes are disabled by a
mutation, a plant cannot grow upright.
Not analogous to human senses
In addition, some animals have senses that humans do not, including the following:
Echolocation
Certain animals, including bats and cetaceans, have the ability to determine orientation to other objects through interpretation of reflected sound (like sonar).
They most often use this to navigate through poor lighting conditions
or to identify and track prey. There is currently an uncertainty whether
this is simply an extremely developed post-sensory interpretation of
auditory perceptions or it actually constitutes a separate sense.
Resolution of the issue will require brain scans of animals while they
actually perform echolocation, a task that has proven difficult in
practice.
Blind people report they are able to navigate and in some cases
identify an object by interpreting reflected sounds (especially their
own footsteps), a phenomenon known as human echolocation.
Electroreception
Electroreception (or electroception) is the ability to detect electric fields. Several species of fish, sharks,
and rays have the capacity to sense changes in electric fields in their
immediate vicinity. For cartilaginous fish this occurs through a
specialized organ called the Ampullae of Lorenzini.
Some fish passively sense changing nearby electric fields; some
generate their own weak electric fields, and sense the pattern of field
potentials over their body surface; and some use these electric field
generating and sensing capacities for social communication.
The mechanisms by which electroceptive fish construct a spatial
representation from very small differences in field potentials involve
comparisons of spike latencies from different parts of the fish's body.
The only orders of mammals that are known to demonstrate electroception are the dolphin and monotreme orders. Among these mammals, the platypus has the most acute sense of electroception.
A dolphin can detect electric fields in water using electroreceptors in vibrissal crypts arrayed in pairs on its snout and which evolved from whisker motion sensors.
These electroreceptors can detect electric fields as weak as 4.6
microvolts per centimeter, such as those generated by contracting
muscles and pumping gills of potential prey. This permits the dolphin to
locate prey from the seafloor where sediment limits visibility and
echolocation.
Body modification enthusiasts have experimented with magnetic implants to attempt to replicate this sense.
However, in general humans (and it is presumed other mammals) can
detect electric fields only indirectly by detecting the effect they have
on hairs. An electrically charged balloon, for instance, will exert a
force on human arm hairs, which can be felt through tactition and
identified as coming from a static charge (and not from wind or the
like). This is not electroreception, as it is a post-sensory cognitive
action.
Magnetoception
Magnetoception (or magnetoreception) is the ability to detect the direction one is facing based on the Earth's magnetic field. Directional awareness is most commonly observed in birds, which rely on their magnetic sense to navigate during migration. It has also been observed in insects such as bees. Cattle make use of magnetoception to align themselves in a north-south direction. Magnetotactic bacteria build miniature magnets inside themselves and use them to determine their orientation relative to the Earth's magnetic field.
Hygroreception
Hygroreception is the ability to detect changes in the moisture content of the environment.
Infrared sensing
The ability to sense infrared thermal radiation evolved independently in various families of snakes. Essentially, it allows these reptiles to "see" radiant heat at wavelengths between 5 and 30 μm to a degree of accuracy such that a blind rattlesnake can target vulnerable body parts of the prey at which it strikes.
It was previously thought that the organs evolved primarily as prey
detectors, but it is now believed that it may also be used in
thermoregulatory decision making. The facial pit underwent parallel evolution in pitvipers and some boas and pythons, having evolved once in pitvipers and multiple times in boas and pythons. The electrophysiology of the structure is similar between the two lineages, but they differ in gross structural anatomy. Most superficially, pitvipers possess one large pit organ on either side of the head, between the eye and the nostril (Loreal pit),
while boas and pythons have three or more comparatively smaller pits
lining the upper and sometimes the lower lip, in or between the scales.
Those of the pitvipers are the more advanced, having a suspended sensory
membrane as opposed to a simple pit structure. Within the family Viperidae, the pit organ is seen only in the subfamily Crotalinae: the pitvipers. The organ is used extensively to detect and target endothermic
prey such as rodents and birds, and it was previously assumed that the
organ evolved specifically for that purpose. However, recent evidence
shows that the pit organ may also be used for thermoregulation.
According to Krochmal et al., pitvipers can use their pits for
thermoregulatory decision making while true vipers (vipers who do not
contain heat-sensing pits) cannot.
In spite of its detection of IR light, the pits' IR detection
mechanism is not similar to photoreceptors – while photoreceptors detect
light via photochemical reactions, the protein in the pits of snakes is
in fact a temperature sensitive ion channel. It senses infrared signals
through a mechanism involving warming of the pit organ, rather than
chemical reaction to light.
This is consistent with the thin pit membrane, which allows incoming IR
radiation to quickly and precisely warm a given ion channel and trigger
a nerve impulse, as well as vascularize the pit membrane in order to
rapidly cool the ion channel back to its original "resting" or
"inactive" temperature.
Other
Pressure detection uses the organ of Weber, a system consisting of three appendages of vertebrae transferring changes in shape of the gas bladder to the middle ear. It can be used to regulate the buoyancy of the fish. Fish like the weather fish and other loaches are also known to respond to low pressure areas but they lack a swim bladder.
Current detection is a detection system of water currents, consisting mostly of vortices, found in the lateral line
of fish and aquatic forms of amphibians. The lateral line is also
sensitive to low-frequency vibrations. The mechanoreceptors are hair cells,
the same mechanoreceptors for vestibular sense and hearing. It is used
primarily for navigation, hunting, and schooling. The receptors of the electrical sense are modified hair cells of the lateral line system.
Polarized light direction/detection is used by bees to orient themselves, especially on cloudy days. Cuttlefish
can also perceive the polarization of light. Most sighted humans can
in fact learn to roughly detect large areas of polarization by an effect
called Haidinger's brush, however this is considered an entoptic phenomenon rather than a separate sense.
Slit sensillae of spiders detect mechanical strain in the exoskeleton, providing information on force and vibrations.
Plant senses
By
using a variety of sense receptors, plants sense light, gravity,
temperature, humidity, chemical substances, chemical gradients,
reorientation, magnetic fields, infections, tissue damage and mechanical
pressure. The absence of a nervous system notwithstanding, plants
interpret and respond to these stimuli by a variety of hormonal and
cell-to-cell communication pathways that result in movement,
morphological changes and physiological state alterations at the
organism level, that is, result in plant behavior. Such physiological
and cognitive functions are generally not believed to give rise to
mental phenomena or qualia, however, as these are typically considered
the product of nervous system activity. The emergence of mental
phenomena from the activity of systems functionally or computationally
analogous to that of nervous systems is, however, a hypothetical
possibility explored by some schools of thought in the philosophy of
mind field, such as functionalism and computationalism.
In the time of William Shakespeare, there were commonly reckoned to be five wits or five senses. At that time, the words "sense" and "wit" were synonyms, so the senses were known as the five outward wits. This traditional concept of five senses is common today.
The traditional five senses are enumerated as the "five material faculties" (pañcannaṃ indriyānaṃ avakanti) in Hindu literature. They appear in allegorical representation as early as in the Katha Upanishad (roughly 6th century BC), as five horses drawing the "chariot" of the body, guided by the mind as "chariot driver".
Depictions of the five traditional senses as allegory became a popular subject for seventeenth-century artists, especially among Dutch and Flemish Baroque painters. A typical example is Gérard de Lairesse's Allegory of the Five Senses (1668), in which each of the figures in the main group alludes to a sense: Sight is the reclining boy with a convex mirror, hearing is the cupid-like boy with a triangle,
smell is represented by the girl with flowers, taste is represented by
the woman with the fruit, and touch is represented by the woman holding
the bird.
The cerebellum is largely responsible for coordinating the unconscious aspects of proprioception.
Proprioception (/ˌproʊprioʊˈsɛpʃən, -priə-/PROH-pree-o-SEP-shən), from Latinproprius, meaning "one's own", "individual", and capio, capere,
to take or grasp, is the sense of the relative position of one's own
parts of the body and strength of effort being employed in movement. It is sometimes described as the "sixth sense".
The brain integrates information from proprioception and from the vestibular system into its overall sense of body position, movement, and acceleration. The word kinesthesia or kinæsthesia (kinesthetic sense)
strictly means movement sense, but has been used inconsistently to
refer either to proprioception alone or to the brain's integration of
proprioceptive and vestibular inputs.
Proprioception has also been described in other animals such as vertebrates, and in some invertebrates such as arthropods. More recently proprioception has also been described in flowering land plants (angiosperms).
History of study
The position-movement sensation was originally described in 1557 by Julius Caesar Scaliger as a "sense of locomotion". Much later, in 1826, Charles Bell expounded the idea of a "muscle sense", which is credited as one of the first descriptions of physiologic feedback mechanisms.
Bell's idea was that commands are carried from the brain to the
muscles, and that reports on the muscle's condition would be sent in the
reverse direction. In 1847 the London neurologist Robert Todd highlighted important differences in the anterolateral and posterior columns of the spinal cord, and suggested that the latter were involved in the coordination of movement and balance.
At around the same time, Moritz Heinrich Romberg, a Berlin neurologist, was describing unsteadiness made worse by eye closure or darkness, now known as the eponymous Romberg's sign, once synonymous with tabes dorsalis, that became recognised as common to all proprioceptive disorders of the legs. Later, in 1880, Henry Charlton Bastian suggested "kinaesthesia" instead of "muscle sense" on the basis that some of the afferent information (back to the brain) comes from other structures, including tendons, joints, and skin. In 1889, Alfred Goldscheider suggested a classification of kinaesthesia into three types: muscle, tendon, and articular sensitivity.
In 1906, Charles Scott Sherrington published a landmark work that introduced the terms "proprioception", "interoception", and "exteroception".
The "exteroceptors" are the organs that provide information originating
outside the body, such as the eyes, ears, mouth, and skin. The interoceptors
provide information about the internal organs, and the "proprioceptors"
provide information about movement derived from muscular, tendon, and
articular sources. Using Sherrington's system, physiologists and
anatomists search for specialised nerve endings that transmit mechanical
data on joint capsule, tendon and muscle tension (such as Golgi tendon organs and muscle spindles), which play a large role in proprioception.
Primary endings of muscle spindles "respond to the size of a
muscle length change and its speed" and "contribute both to the sense of
limb position and movement".
Secondary endings of muscle spindles detect changes in muscle length,
and thus supply information regarding only the sense of position. Essentially, muscle spindles are stretch receptors.
It has been accepted that cutaneous receptors also contribute directly
to proprioception by providing "accurate perceptual information about
joint position and movement", and this knowledge is combined with
information from the muscle spindles.
Components
A major component of proprioception is joint position sense, which is determined by measuring the accuracy of joint–angle replication.
Clinical aspects of joint position sense are measured in joint position
matching tests that measure a subject's ability to detect an externally
imposed passive movement, or the ability to reposition a joint to a
predetermined position. These involve an individual's ability to
perceive the position of a joint without the aid of vision. Often it is
assumed that the ability of one of these aspects will be related to
another; however, experimental evidence suggests there is no strong
relation between these two aspects.
This suggests that while these components may well be related in a
cognitive manner, they may in fact be physiologically separate.
More recent work into the mechanism of ankle sprains suggests
that the role of reflexes may be more limited due to their long
latencies (even at the spinal cord level), as ankle sprain events occur
in perhaps 100 ms or less. In accordance, a model has been proposed to
include a 'feedforward' component of proprioception, whereby the subject
will also have central information about the body's position before
attaining it.
Kinesthesia is a key component in muscle memory and hand-eye coordination, and training can improve this sense (see blind contour drawing).
The ability to swing a golf club or to catch a ball requires a finely
tuned sense of the position of the joints. This sense needs to become
automatic through training to enable a person to concentrate on other
aspects of performance, such as maintaining motivation or seeing where
other people are.
Basis
The initiation of proprioception is the activation of a proprioreceptor in the periphery. The proprioceptive sense is believed to be composed of information from sensory neurons located in the inner ear (motion and orientation) and in the stretch receptors located in the muscles
and the joint-supporting ligaments (stance). There are specific nerve
receptors for this form of perception termed "proprioreceptors", just as
there are specific receptors for pressure, light, temperature, sound,
and other sensory experiences. Proprioreceptors are sometimes known as adequate stimuli receptors. TRPN, a member of the transient receptor potential family of ion channels, has been found to be responsible for proprioception in fruit flies, nematode worms, African clawed frogs, and zebrafish. PIEZO2, a nonselective cation channel, has been shown to underlie the mechanosensitivity of proprioceptors in mice. The channel mediating human proprioceptive mechanosensation has yet to be discovered.
Although it was known that finger kinesthesia relies on skin sensation, recent research has found that kinesthesia-based haptic perception relies strongly on the forces experienced during touch. This research allows the creation of "virtual", illusory haptic shapes with different perceived qualities.
Conscious and non-conscious
In humans, a distinction is made between conscious proprioception and non-conscious proprioception:
A non-conscious reaction is seen in the human proprioceptive reflex, or righting reflex—in the event that the body tilts in any direction, the person will cock their head back to level the eyes against the horizon. This is seen even in infants as soon as they gain control of their neck muscles. This control comes from the cerebellum, the part of the brain affecting balance.
Applications
Field sobriety testing
Proprioception is tested by American police officers using the field sobriety test to check for alcohol intoxication.
The subject is required to touch his or her nose with eyes closed;
people with normal proprioception may make an error of no more than 20 millimeters,
while people suffering from impaired proprioception (a symptom of
moderate to severe alcohol intoxication) fail this test due to
difficulty locating their limbs in space relative to their noses.
Diagnosis
There are several relatively specific tests of the subject's ability to proprioceive. These tests are used in the diagnosis of neurological disorders. They include the visual and tactile placing reflexes.
Training
Proprioception
is what allows someone to learn to walk in complete darkness without
losing balance. During the learning of any new skill, sport, or art, it
is usually necessary to become familiar with some proprioceptive tasks
specific to that activity. Without the appropriate integration of
proprioceptive input, an artist would not be able to brush paint onto a canvas without looking at the hand as it moved the brush over the canvas; it would be impossible to drive an automobile because a motorist would not be able to steer or use the pedals while looking at the road ahead; a person could not touch type or perform ballet; and people would not even be able to walk without watching where they put their feet.
Oliver Sacks reported the case of a young woman who lost her proprioception due to a viral infection of her spinal cord.
At first she could not move properly at all or even control her tone of
voice (as voice modulation is primarily proprioceptive). Later she
relearned by using her sight (watching her feet) and inner ear
only for movement while using hearing to judge voice modulation. She
eventually acquired a stiff and slow movement and nearly normal speech,
which is believed to be the best possible in the absence of this sense.
She could not judge effort involved in picking up objects and would grip
them painfully to be sure she did not drop them.
The proprioceptive sense can be sharpened through study of many disciplines. Examples are the Feldenkrais method and the Alexander Technique. Juggling trains reaction time, spatial location, and efficient movement. Standing on a wobble board or balance board is often used to retrain or increase proprioception abilities, particularly as physical therapy for ankle or knee injuries. Slacklining is another method to increase proprioception.
Standing on one leg (stork standing) and various other body-position challenges are also used in such disciplines as Yoga, Wing Chun and T'ai Chi Ch'uan. Also, the vestibular system of the inner ear, vision and proprioception are the main three requirements for balance. Moreover, there are specific devices designed for proprioception training, such as the exercise ball, which works on balancing the abdominal and back muscles.
Joint position matching
"Joint
position matching" is an established protocol for measuring
proprioception, and joint position sense specifically, without the aid
of visual or vestibular information.
During such tasks, individuals are blindfolded while a joint is moved
to a specific angle for a given period of time, returned to neutral, and
the subjects are asked to replicate the specified angle. Measured by
constant and absolute errors, ability to accurately identify joint
angles over a series of conditions is the most accurate means of
determining proprioceptive acuity in isolation to date.
Recent investigations have shown that hand dominance, participant
age, active versus passive matching, and presentation time of the angle
can all affect performance on joint position matching tasks. Joint position matching has been used in clinical settings in both the upper and lower extremities.
Impairment
Temporary
loss or impairment of proprioception may happen periodically during
growth, mostly during adolescence. Growth that might also influence this
would be large increases or drops in bodyweight/size due to
fluctuations of fat (liposuction, rapid fat loss or gain) and/or muscle content (bodybuilding, anabolic steroids, catabolisis/starvation). It can also occur in those that gain new levels of flexibility, stretching, and contortion.
A limb's being in a new range of motion never experienced (or at least,
not for a long time since youth perhaps) can disrupt one's sense of
location of that limb. Possible experiences include suddenly feeling
that feet or legs are missing from one's mental self-image; needing to
look down at one's limbs to be sure they are still there; and falling
down while walking, especially when attention is focused upon something
other than the act of walking.
Proprioception is occasionally impaired spontaneously, especially when one is tired. Similar effects can be felt during the hypnagogic state of consciousness,
during the onset of sleep. One's body may feel too large or too small,
or parts of the body may feel distorted in size. Similar effects can
sometimes occur during epilepsy or migraineauras. These effects are presumed to arise from abnormal stimulation of the part of the parietal cortex of the brain involved with integrating information from different parts of the body.
Proprioceptive illusions can also be induced, such as the Pinocchio illusion.
The proprioceptive sense is often unnoticed because humans will adapt to a continuously present stimulus; this is called habituation, desensitization, or adaptation.
The effect is that proprioceptive sensory impressions disappear, just
as a scent can disappear over time. One practical advantage of this is
that unnoticed actions or sensation continue in the background while an
individual's attention can move to another concern. The Alexander
Technique addresses these unconscious elements by bringing attention to
them and practicing a new movement with focus on how it feels to move in
the new way.
People who have a limb amputated may still have a confused sense of that limb's existence on their body, known as phantom limb syndrome.
Phantom sensations can occur as passive proprioceptive sensations of
the limb's presence, or more active sensations such as perceived
movement, pressure, pain, itching, or temperature. There are a variety
of theories concerning the etiology of phantom limb
sensations and experience. One is the concept of "proprioceptive
memory", which argues that the brain retains a memory of specific limb
positions and that after amputation there is a conflict between the
visual system, which actually sees that the limb is missing, and the
memory system which remembers the limb as a functioning part of the
body.
Phantom sensations and phantom pain may also occur after the removal of
body parts other than the limbs, such as after amputation of the
breast, extraction of a tooth (phantom tooth pain), or removal of an eye
(phantom eye syndrome).
Temporary impairment of proprioception has also been known to occur from an overdose of vitamin B6
(pyridoxine and pyridoxamine). Most of the impaired function returns to
normal shortly after the amount of the vitamin in the body returns to a
level that is closer to that of the physiological norm. Impairment can
also be caused by cytotoxic factors such as chemotherapy.
It has been proposed that even common tinnitus
and the attendant hearing frequency-gaps masked by the perceived sounds
may cause erroneous proprioceptive information to the balance and
comprehension centers of the brain, precipitating mild confusion.
Proprioception is permanently impaired in patients that suffer from joint hypermobility or Ehlers-Danlos syndrome (a genetic condition that results in weak connective tissue throughout the body).
It can also be permanently impaired from viral infections as reported
by Sacks. The catastrophic effect of major proprioceptive loss is
reviewed by Robles-De-La-Torre (2006). There is also some evidence that proprioception is impaired in autism spectrum disorders such as Asperger Syndrome.
Proprioception is also permanently impaired in physiological aging (presbypropria).
Plants
Terrestrial plants control the orientation of their primary growth through the sensing of several vectorial stimuli such as the light gradient or the gravitational acceleration. This control has been called tropism. However, a quantitative study of shootgravitropism
demonstrated that, when a plant is tilted, it cannot recover a steady
erected posture under the sole driving of the sensing of its angular
deflection versus gravity. An additional control through the continuous
sensing of its curvature by the organ and the subsequent driving an active straightening process are required.
Being a sensing by the plant of the relative configuration of its
parts, it has been called proprioception. This dual sensing and control
by gravisensing and proprioception has been formalized into a unifying mathematical model simulating the complete driving of the gravitropic movement. This model has been validated on 11 species sampling the phylogeny of land angiosperms, and on organs of very contrasted sizes, ranging from the small germination of wheat (coleoptile) to the trunk of poplar trees. This model also shows that the entire gravitropic dynamics is controlled by a single dimensionless number
called the "Balance Number", and defined as the ratio between the
sensitivity to the inclination angle versus gravity and the
proprioceptive sensitivity. This model has been extended to account for
the effects of the passive bending of the organ under its self-weight,
suggesting that proprioception is active even in very compliant stems,
although they may not be able to efficiently straighten depending on
their elastic deformation under the gravitational pull.
Further studies have shown that the cellular mechanism of proprioception in plants involves myosin and actin, and seems to occur in specialized cells. Proprioception was then found to be involved in other tropisms and to be central also to the control of nutation.
These results change the view we have on plant sensitivity. They are also providing concepts and tools for the breeding of crops that are resilient to lodging, and of trees with straight trunks and homogeneous wood quality.
The discovery of proprioception in plants has generated an interest in the popular science and generalist media. This is because this discovery questions a long-lasting a priori that we have on plants. In some cases this has led to a shift between proprioception and self-awareness or self-consciousness.
There is no scientific ground for such a semantic shift. Indeed, even
in animals, proprioception can be unconscious; so it is thought to be
in plants.







.jpg)









